Case IH Magnum 335, Challenger MT685C, Claas Arion 630C подключение по CAN шине
Спешим сообщить о новых подключениях к CAN шине сельскохозяйственной технике. Мы предоставляем информацию прежде всего о тяжелых тракторах, где расход топлива существенный и без контроля топлива обойтись просто невозможно, так как финансовые потери могут быть колоссальными в случае злоупотреблениями топливом или использования техники не по назначению.
Такой вариант получения информации по расходу или уровню топлива максимально приближенный к реальному значению, но самое главное нет никакого вмешательства в топливную систему. Мы всегда стараемся предложить нашим клиентам максимально эффективное решение по контролю топлива, при минимальных финансовых инвестициях. Недавно мы посетили нашего уважаемого клиента и подключили несколько объектов к системе «Агроконтроль» используя CAN шину.
Прочитанные параметры с CAN шины трактора Case IH Magnum 335:

1.Полный расход топлива;
2.Уровень топлива в баке;
3.Обороты двигателя;
4.Температура двигателя;
5.Полное время работы двигателя и т.д.
Прочитанные параметры с CAN шины трактора Challenger MT685C:

1.Часовой расход топлива;
2.Мгновенный путевой расход топлива;
3.Обороты двигателя;
4.Процент загрузки двигателя на текущей скорости;
5.Актуальный момент двигателя;
6.Температура окружающей среды и т.д.
Прочитанные параметры с CAN шины трактора Claas Arion 630C:

1.Полный расход топлива;
2.Уровень топлива в баке;
3.Обороты двигателя;
4.Температура двигателя;
5.Полный пробег;
6.Нагрузка двигателя и т.д.
Посещайте нашу рубрику, так как обновление планируется совсем скоро.
Источник
Can шина в тракторах
Диагностика и ремонт: CAN — шина
Именно так выглядит ( в основном) та самая «шина CAN «, с которой в последнее время нам придется сталкиваться все чаще и чаще:

Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
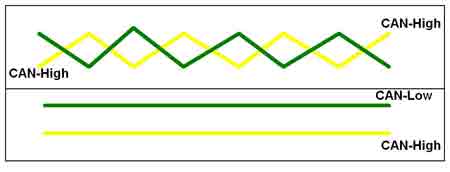
CAN-High — желтым цветом
CAN-Low — зеленым цветом
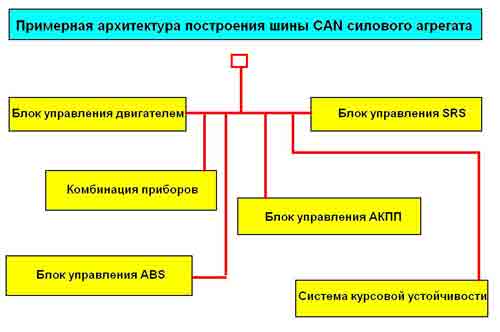
Всего существует несколько разновидностей шин CAN , определяемых выполняемыми ими функциями:
Шина CAN силового агрегата (быст рый канал ) .
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медле нный канал ) .
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно — командной системы (медленн ый канал ), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами ) .
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH ).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair . А провода, которые образуют эту пару, называются CAN High и CAN Low .
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
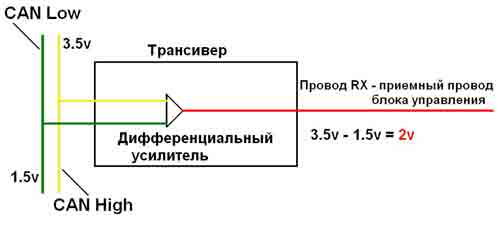
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
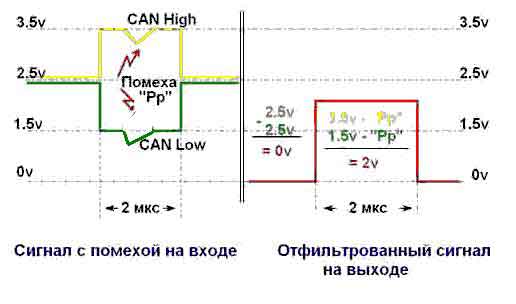
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – » Pp «) вычитается из напряжения
на проводе High (3,5 В – » Pp «) и в обработанном сигнале помеха отсутствует ( » Pp » — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Вас также может заинтересовать:
Шина CAN — это страшно?
Источник
Can шина в тракторах

А.А. Мажей, инженер ГУ “Белорусская машиноиспытательная станция”
Заместитель директора по научной работе Республиканского института инновационных технологий БНТУ, канд. техн. наук, профессор
В статье описаны способы контроля расхода топлива автотракторной техники, а также приведен обзор зарубежных исследований, касающихся популярного метода считывания данных о расходе топлива с электронных блоков управления через шину CAN. Даны рекомендации о применении этого метода в современных системах мониторинга работы сельскохозяйственных машин.
Ключевые слова: датчик расхода топлива, дизельный двигатель, CAN шина, мониторинг.
The article describes the ways to control fuel consumption of the automobiles and tractors, as well as provides an overview of foreign studies on the popular method for reading fuel consumption data from electronic control units via the CAN bus. Recommendations are given on the application of this method in the modern fleet monitoring systems.
Keywords: fuel consumption sensor, diesel engine, CAN bus, fleet monitoring.
Введение
Контроль расхода топлива в агропромышленном комплексе является актуальной задачей. Широкое развитие последнее десятилетие получают системы GPS-мониторинга работы автотракторной техники, которые дают полезный набор информации, как для оперативного контроля, так и для учета выработки и расхода горюче-смазочных материалов. Часто эти системы дополняются функцией контроля реального расхода топлива с помощью дополнительных датчиков. Ещё более популярным методом является считывание данных о расходе топлива с электронных блоков управления двигателем. При этом не требуется установка дополнительных датчиков.
Цель данной работы заключается в выработке рекомендаций для использования данных о расходе топлива, получаемых из CAN-шины, в системах мониторинга работы автотракторной техники.
Основная часть
В Республике Беларусь разработаны и реализуются “Мероприятия по внедрению механизма эффективного контроля за использованием топлива в организациях агропромышленного комплекса, исключающие случаи его хищения” (№ 06/217-1073 от 03.12.2015 г.). Согласно п.8 данных Мероприятий продолжается внедрение систем контроля расхода топлива сельскохозяйственной техники.
Бортовые системы контроля расхода топлива можно разделить на 3 группы:
- • автономные счетчики-расходомеры дизельного топлива;
- • регистраторы параметров накопительного типа, подключаемые к датчикам уровня либо расхода топлива разных типов. (cчитывание и анализ данных осуществляется на персональном компьютере после переноса данных);
- • системы GPS/ГЛОНАСС-мониторинга с функцией определения местоположения, регистрации сигналов бортовых и дополнительных датчиков, а также удаленной передачей на сервер сбора данных.
С начала 21-го века из-за падения стоимости элементной базы и передачи данных третья группа непрерывно наращивала свою популярность у пользователей, и сейчас система мониторинга транспорта фактически вытеснила первые две группы, которые могут считаться анахронизмом. В данной статье раскрываются возможности применения самого простого метода контроля расхода топлива – считывания показаний бортового блока управления двигателем. Эта возможность осуществляется бортовыми регистраторами (терминалами) GPS/ГЛОНАСС-мониторинга, имеющими интерфейс CAN и поддерживающими протокол SAE J1939 [1]. Данный протокол реализуется во всех большегрузных автомобилях, сельскохозяйственной технике, строительных машинах и других устройствах на основе современных дизельных двигателей, оборудованных электронными блоками управления Евро-3 и выше.
При этом в сельскохозяйственной технике перспективным является распространение стандарта ISOBUS, который является надстройкой над стандартами CAN и J1939 и описывает взаимодействие навесного оборудования с шасси трактора. [2].

Рис 1. ISOBUS-шина
В индустрии GPS-мониторинга подключение к шине CAN является самым удобным и распространенным методом получения информации. Требуется лишь терминал с поддержкой этой функции и знание точки подключения в бортовой сети автомобиля. Необходимо отметить, что ведущие производители терминалов мониторинга упрощают настройку подключения к шине CAN тем, что программа настройки терминала обладает функцией CAN-сканера, сразу оповещая о том, какие данные прибор может получить с электронных блоков двигателя. Монтажнику остается лишь выделить те данные, которые его интересуют (рис.2).


Рис. 2. Терминал АвтоГРАФ GSM и встроенный сканер CAN-шины
Рассматриваемый метод контроля расхода топлива по показаниям шины CAN обладает некоторыми недостатками. Во-первых, не все дизельные двигатели оснащены современными блоками управления. Во-вторых, этот объем топлива определяется расчетным путем, исходя из частоты вращения двигателя, числа цилиндров, времени впрыска. Вследствие этого, неизбежно появляется ошибка измерения, которая зависит от состояния топливной аппаратуры и не является постоянной. В-третьих, погрешность контроля расхода топлива по CAN может быть и в меньшую сторону, что может привести к обвинении в хищении топлива невиновного водителя. В-четвертых, счетчик расхода топлива в электронном блоке управления – накопительный расход топлива. Погрешность его относительно остатка топлива в баке также является накопительной. А поскольку учет движения ГСМ ведется по остаткам топлива в баках, то через несколько месяцев работы системы можно обнаружить достаточно серьезное отклонение (в несколько % от оборота топлива за период) остатка по данным системы от фактического. Это может быть поводом для изменения коэффициента пересчета данных с CAN-шины.
В ряде организаций проводился анализ погрешности данных о расходе топлива, получаемых из CAN-шины. В работе [3] изучалась погрешность сообщения о мгновенном расходе топлива. Данное сообщение имеет идентификатор PGN FEF2 SPN 183 согласно SAE J1939. Цель этого исследования состояла в том, чтобы сравнить значения скорости топлива, собранные с шины CAN, с физически измеренной величиной расхода топлива из результатов испытаний трактора, проведенных в испытательной лаборатории Небраска. Для этого исследования использовались шесть тракторов средней мощности (245-370 л/с). Сбор данных с обеих шин CAN и измерение расхода топлива выполнялось на нагрузочном стенде NTTL. Во время испытаний были выбраны несколько диапазонов оборотов двигателя и нагрузочных режимов. Результаты испытаний приведены на рис. 3 [3].

Рис. 3. Погрешность шины CAN.
Результаты этого исследования показывают, что:
- • Каждый испытуемый трактор имел погрешность показаний шины CAN, растущую при уменьшении нагрузки на трактор.
- • Минимальная погрешность данных CAN-шины соответствует максимальной нагрузке на двигатель, максимальная – минимальной.
В работе [4] отмечено следующее: даже одинаковые двигатели могут демонстрировать значительные различия в точности расхода топлива по показаниям CAN-шины. Максимальная ошибка эксперимента достигала около 40% при минимальной нагрузке Claas Axion 850 Cebis (мгновенный расход топлива не превышал 2 л/ч), при расходе топлива свыше 55 л/ч ошибка снизилась до 3.7%. Существенная разница наблюдалась у трактора John Deere 8320R с двигателем 235 кВт. При мгновенном расходе топлива около 70 л / ч была получена погрешность 16%. Авторы указанной работы [4], основываясь на своем опыте аналогичных исследований других типов тракторов, убеждены, что непредсказуемая точность CAN является общим явлением для транспортных средств.
Канадская группа компаний PIT в работе [5] провела исследование точности значений счетчика расхода топлива, передаваемого шиной CAN (сообщение PGN FEE9, SPN 250), на грузовых автомобилях нескольких марок. Реальный расход топлива был измерен по методике SAE Fuel Consumption Test Procedure Type II. Полученные результаты свидетельствуют о том, что данные электронного блока управления двигателем не всегда могут быть использованы для контроля реального расхода топлива, а также определения экономичного режима движения.
Было проверено 14 автомобилей от 4 производителей. Ниже приведены основные результаты:
- • двигатели Cummins (4 автомобиля, в общей сложности прошли 24 теста): погрешность от -5,4% до -6,2% с повторяемостью от 0,18 до 0,81%;
- • двигатели Detroit Diesel (7 автомобилей, в общей сложности прошли 26 тестов): погрешность от -2,6% до 2,1% с повторяемостью от 0,37 до 1,09%;
- • двигатель Mercedes (1 автомобиль был протестирован, в общей сложности прошел 9 тестов): средняя погрешность 0,9% с повторяемостью 1,59%;
- • двигатель Volvo (2 автомобиля, в общей сложности прошли 29 тестов): погрешность от -3% до 0,9% с повторяемостью от 0,25 до 0,84%.
Стоит отметить, что все производители, кроме Mercedes, в проведенных испытаниях проявили склонность к занижению расхода топлива относительно реальных данных.
В исследовании [6] было обнаружено, что данные по расходу топлива с шины CAN занижают расход топлива на 6% для обычных грузовых автомобилей категории N1 и на 11% для гибридных. При этом была отмечена хорошая повторяемость результатов. Таким образом, точность показаний можно существенно улучшить путем определения коэффициента корректировки. Хорошую повторяемость также можно отметить и в исследовании [5].
Заключение
1. Использование данных о расходе топлива с CAN-шины в системах удаленного мониторинга работы мобильных машин является безусловно оправданным, так как предоставляет ценную информацию эксплуатирующим организациям без дополнительных затрат на специальные датчики расхода топлива.
2. Ведение учета расхода топлива с применением CAN-шины и принятие управленческих решений не рекомендуется без предварительной проверки точности показаний системы.
3. Для автоматизации учета расхода топлива на базе данных CAN-шины необходимо установление поправочного коэффициента, определенного экспериментальным методом на базе замера действительного потребления топлива в эксплуатации.
Список использованной литературы
1. SAE J1939-71. Surface Vehicle Recommended Practice. Vehicle Application Layer.
2. ISO 11783-1:2007. Tractors and machinery for agriculture and forestry — Serial control and communications data network.
3. Controller Area Network (CAN) Bus J1939 Data Acquisition Methods and Parameter Accuracy Assessment Using Nebraska Tractor Test Laboratory Data [Electronic resource] / Samuel E. Marx // University of Nebraska-Lincoln – 2015 – Mode of access : http://digitalcommons.unl.edu/cgi/viewcontent.cgi?article=1051&context=biosysengdiss – Date of access : 26.06.2017.
4.J. The use of CAN-Bus messages of an agricultural tractor for monitoring its operation / Čupera, P. Sedlák // Research in Agricultural Engineering, Vol. 57, №4, p.117-127 – 2011 — Department of Engineering and Automobile Transport, Faculty of Agronomy, Mendel University in Brno, Brno, Czech Republic — Mode of access : http://www.agriculturejournals.cz/publicFiles/53318.pdf — Date of access : 26.06.2017.
5. Is ECM data accurate enough to use when making decisions about fuel saving technologies or operational practices? Case Study / A PIT Group Technical Report – 2015 — Mode of access : http://thepitgroup.com/wp-content/uploads/2015/10/ECM-Case-Study-A-PIT-Group-Case-Study.pdf — Date of access : 26.06.2017.
6. Measured Laboratory and In-Use Fuel Economy Published Observed over Targeted Drive Cycles for Comparable Hybrid and Conventional Package Delivery Vehicles / Michael P. Lammert, Kevin Walkowicz, Adam Duran and Petr Sindler / SAE Paper №2012-01-2049 — National Renewable Energy Laboratory – 2012.
Журнал «Изобретатель» включен ВАК Республики Беларусь в перечень научных изданий для опубликования результатов диссертационных исследований.
Информация, размещенная на этом портале, является интеллектуальной собственностью Редакции. Все права защищены. Перепечатка разрешается только с гиперссылкой на izobretatel.by.
Copyright © 2016-2021 Журнал «Изобрататель?». All Rights Reserved.
Источник