Библиотека Wire для Arduino для работы с шиной I2C
Описание библиотеки Wire
Данная библиотека позволяет вам взаимодействовать с I2C / TWI устройствами. На платах Arduino с компоновкой R3 (распиновка 1.0) SDA (линия данных) и SCL (линия тактового сигнала) находятся на выводах около вывода AREF. Arduino Due имеет два I2C / TWI интерфейса: SDA1 и SCL1 находятся около вывода AREF, а дополнительные линии находятся на выводах 20 и 21.
В таблице ниже показано, где расположены TWI выводы на разных платах Arduino.
| Плата | I2C/TWI выводы |
|---|---|
| Uno, Ethernet | A4 (SDA), A5 (SCL) |
| Mega2560 | 20 (SDA), 21 (SCL) |
| Leonardo | 2 (SDA), 3 (SCL) |
| Due | 20 (SDA), 21 (SCL), SDA1, SCL1 |
Начиная с Arduino 1.0, данная библиотека наследует функции Stream , что делает ее совместимой с другими библиотеками чтения/записи. Из-за этого send() и receive() были заменены на read() и write() .
Примечание
Существуют 7- и 8-битные версии адресов I2C. 7 битов идентифицируют устройство, а восьмой бит определяет, идет запись или чтение. Библиотека Wire использует 7 битные адреса. Если у вас есть техническое описание или пример кода, где используется 8-битный адрес, вам нужно откинуть младший бит (т.е. сдвинуть значение на один бит вправо), получив адрес от 0 до 127. Однако адреса от 0 до 7 не используются, так как зарезервированы, поэтому первым адресом, который может быть использован, является 8. Обратите внимание, что при подключении выводов SDA/SCL необходимы подтягивающие резисторы. Для более подробной информации смотрите примеры. На плате MEGA 2560 есть подтягивающие резисторы на выводах 20 и 21.
Описание методов
Wire.begin()
Инициализирует библиотеку Wire и подключается к шине I2C как ведущий (мастер) или ведомый. Как правило, должен вызываться только один раз.
address : 7-битный адрес ведомого устройства (необязательно); если не задан, плата подключается к шине как мастер.
Примеры для ведомого устройства смотрите в примерах к методам onReceive() и onRequest() . Примеры для ведущего устройства смотрите в примерах к остальным методам. .
Wire.requestFrom()
Используется мастером для запроса байтов от ведомого устройства. Эти байты могут быть получены с помощью методов available() и read() .
Для совместимости с определенными I2C устройствами, начиная с Arduino 1.0.1, requestFrom() принимает аргумент логического типа данных, меняющий его поведение.
Если этот аргумент равен true , то requestFrom() после запроса посылает сообщение STOP, освобождая шину I2C.
Если этот аргумент равен false , то requestFrom() после запроса посылает сообщение RESTART. Шина не освобождается, что мешает другому устройству-мастеру влезть между сообщениями. Это позволяет одному ведущему устройству посылать несколько запросов, пока оно контролирует шину.
По умолчанию этот аргумент равен true .
Wire.requestFrom(address, quantity, stop)
Параметры
- address : 7-битный адрес устройства, у которого запрашиваются байты;
- quantity : количество запрашиваемых байтов;
- stop : boolean . true посылает сообщение STOP после запроса. false посылает сообщение RESTART после запроса, сохраняя соединение активным.
Возвращаемое значение
byte : количество байтов, возвращенных от ведомого устройства.
Смотрите пример к методу read() .
Wire.beginTransmission()
Начинает передачу на ведомое I2C устройство с заданным адресом. После него последовательность байтов для передачи ставится в очередь с помощью функции write() , и их передача с помощью вызова endTransmission() .
address : 7-битный адрес устройства, на которое необходимо передать данные.
Смотрите пример к методу write() .
Wire.endTransmission()
Завершает передачу на ведомое устройство, которая была начата методом beginTransmission() и передает байты, которые были поставлены в очередь методом write() .
Для совместимости с определенными I2C устройствами, начиная с Arduino 1.0.1, requestFrom() принимает аргумент логического типа данных, меняющий его поведение.
Если этот аргумент равен true , то requestFrom() после передачи посылает сообщение STOP, освобождая шину I2C.
Если этот аргумент равен false , то requestFrom() после передачи посылает сообщение RESTART. Шина не освобождается, что мешает другому устройству-мастеру влезть между сообщениями. Это позволяет одному ведущему устройству посылать несколько передач, пока оно контролирует шину.
По умолчанию этот аргумент равен true .
stop : boolean . true посылает сообщение STOP после передачи. false посылает сообщение RESTART после передачи, сохраняя соединение активным.
byte , который указывает на состояние передачи:
- 0: успех;
- 1: данные слишком длинны для заполнения буфера передачи;
- 2: принят NACK при передаче адреса;
- 3: принят NACK при передаче данных;
- 4: остальные ошибки.
Пример
Смотрите пример к методу write() .
Wire.write()
Записывает данные от ведомого устройства в отклик на запрос от ведущего устройства, или ставит в очередь байты для передачи от мастера к ведомому устройству (между вызовами beginTransmission() и endTransmission() ).
Параметры
- value : значение для передачи, один байт.
- string : строка для передачи, последовательность байтов.
- data : массив данных для передачи, байты.
- length : количество байтов для передачи.
Возвращаемое значение
byte : write() возвращает количество записанных байтов, хотя чтение этого количества не обязательно.
Wire.available()
Возвращает количество байтов, доступных для получения с помощью read() . Этот метод должен вызываться на ведущем устройстве после вызова requestFrom() или на ведомом устройстве внутри обработчика onReceive() .
Количество байтов, доступных для чтения.
Смотрите пример к методу read() .
Wire.read()
Считывает байт, который был передан от ведомого устройства к ведущему после вызова requestFrom() , или который был передан от ведущего устройства к ведомому.
byte : очередной принятый байт.
Wire.setClock()
Изменяет тактовую частоту для связи по шине I2C. У ведомых I2C устройств нет минимальной рабочей тактовой частоты, однако обычно используется 100 кГц.
clockFrequency : значение частоты (в герцах) тактового сигнала. Принимаются значения 100000 (стандартный режим) и 400000 (быстрый режим). Некоторые процессоры также поддерживают 10000 (низкоскоростной режим), 1000000 (быстрый режим плюс) и 3400000 (высокоскоростной режим). Чтобы убедиться, что необходимый режим поддерживается, обращайтесь к технической документации на конкретный процессор.
Wire.onReceive()
Регистрирует функцию, которая будет вызываться, когда ведомое устройство принимает передачу от мастера.
handler : функция, которая должна будет вызываться, когда ведомое устройство принимает данные; она должна принимать один параметр int (количество байтов, прочитанных от мастера) и ничего не возвращать, т.е.:
void myHandler(int numBytes)
Код для платы Arduino, работающей в качестве ведомого устройства:
Wire.onRequest()
Регистрирует функцию, которая будет вызываться, когда мастер запрашивает данные от ведомого устройства.
handler : функция, которая должна будет вызываться, она не принимает параметров и ничего не возвращает, т.е.:
Код для платы Arduino, работающей в качестве ведомого устройства:
Источник
I²C — Inter-Integrated Circuit, краткое руководсто
Общие сведения:
I²C (и-квадрат-це, ай-ту-си, ай-сквэрд-си), Inter-Integrated Circuit — последовательная шина обмена данными между интегральными схемами. Изобретена и в начале 80-х компанией Philips Semiconductor (теперь NXP), передача данных осуществляется по двум проводам в обе стороны. Ведущий и ведомый могут выполнять как роль приёмника, так и передатчика. Для возможности соединения более двух устройств используются адресация. Опрашивать адреса шины может только ведущий. Адрес последовательно выводится на линию SDA сразу после сигнала Start. В этой статье речь пойдёт только о 7-ми битной адресации, так же не будет затронута тема нескольких ведущих. На каждом устройстве, поддерживающем I²C обычно обозначены два вывода: SDA и SCL. SDA (serial data) — означает последовательные данные, SCL (serial clock) — последовательное тактирование. Эти выводы являются выводами открытого коллектора или открытого стока, это означает что ведущий и ведомый могут только притягивать электрический потенциал к земле, поэтому на каждой линии должны быть подтягивающие резисторы. Сопротивление резисторов рассчитывается в зависимости от паразитной ёмкости линии.
Подключение:
Шина поддерживает подключение до 112 устройств (при 7-ми битной адресации) по двум проводам (плюс GND и Vcc), может иметь несколько ведущих и ведомых. При использовании нескольких ведущих, каждый из них должен поддерживать этот режим и уметь определять состояние занятой шины.
I²C на Arduino
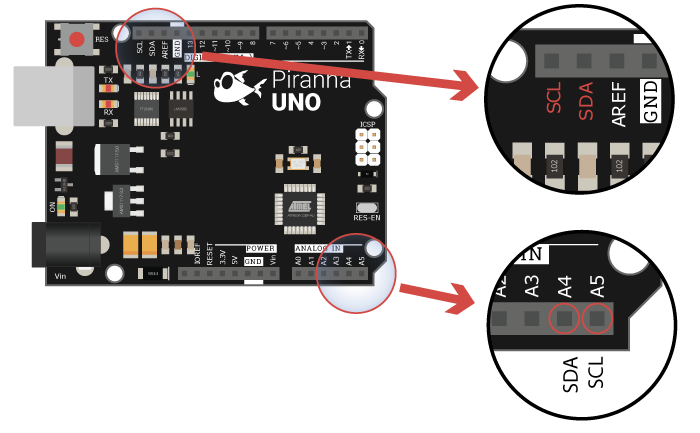
Arduino UNO R3/Piranha UNO
На Arduino UNO R3/Piranha UNO шина I2C находится на выводах A4, A5. Также в эти выводы продублированы на колодке с цифровыми выводами рядом с кнопкой Reset.
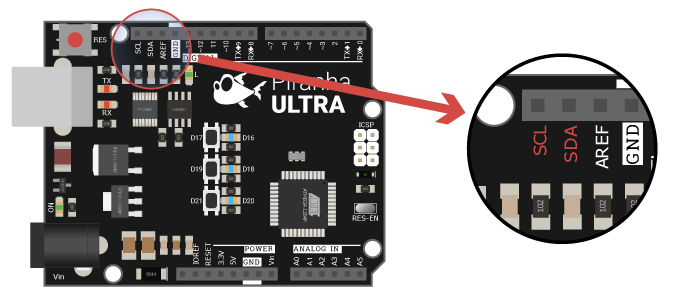
Piranha ULTRA
На Piranha ULTRA шина I²C не занимает аналоговые выводы A4, A5 и находится на цифровой колодке рядом с кнопкой Reset, выводы обозначены SDA и SCL
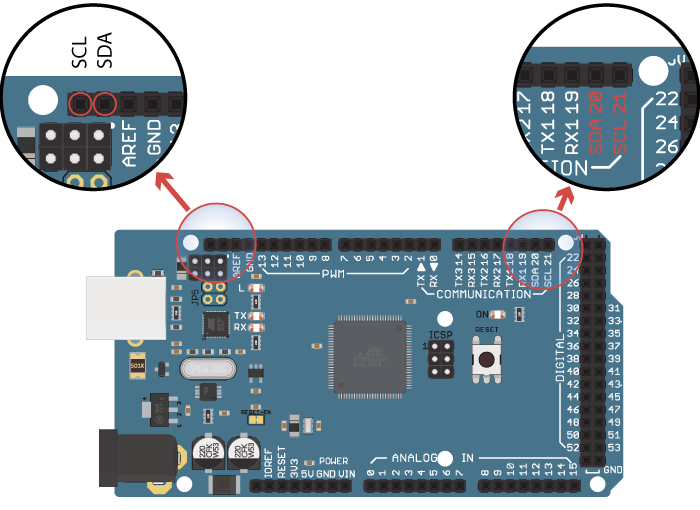
Arduino MEGA R3
На Arduino MEGA R3 шина I²C находится на цифровой колодке на крайних выводах, близких к разъёму USB и на выводах 20, 21. Выводы объединены.
Примеры для Arduino
Работа с шиной с использованием встроенной библиотеки Wire Arduino IDE на примере Trema-модуля LED Матрицы 8×8 — i2c
В этом примере на матрицу выводится изображение стрелки. Стоит заметить, ко всем нашим модулям написаны библиотеки с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке.
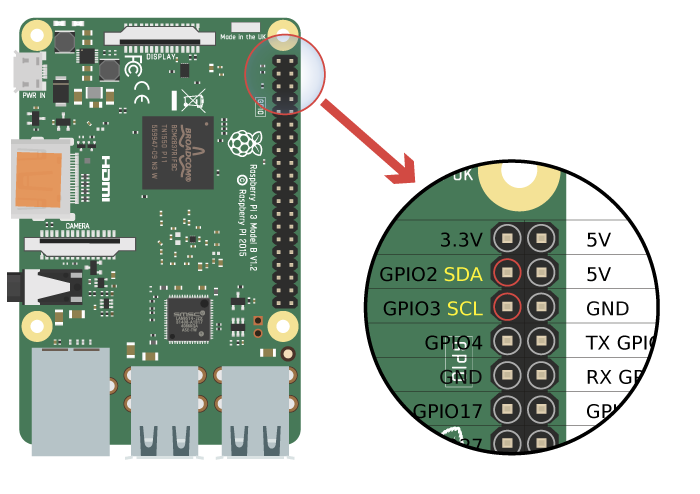
I²C на Raspberry Pi
На Raspberry Pi I²C выводы это 3-й и 5-й выводы колодки, GPIO2 и GPIO3 по номенклатуре BCM и выводы 8, 9 по номенклатуре WiringPi.
Примеры для Raspberry
Работа с шиной с использованием модуля smbus для Python на примере Trema-модуля Матрицы 8×8 — i2c. Для работы с шиной её необходимо включить в настройках Raspberry при помощи утилиты raspi-config . Ссылка на подробное описание как это сделать.
Так же как и в примере с Arduino, в этом примере на матрицу выводится изображение стрелки. Стоит заметить, к Trema-модулю LED Матрица 8×8 — i2c написана библиотека с высокоуровневым интерфейсом и вовсе не обязательно работать с матрицей на низком уровне. Подробнее о работе с библиотекой матрицы можно узнать по этой ссылке
Подробнее о шине I²C:
Резисторы, ёмкость и длина линий шины
В официальном описании от NXP ничего не сказано о максимальной длине шины, но не стоит этим злоупотреблять. Шина была придумана для обмена информации между интегральными схемами в пределах одной платы одного устройства. В расчёт бралась только паразитная ёмкость линии, которая сказывается на скорости нарастания фронта волны. От этой ёмкости зависит номинал подтягивающих резисторов. Можно подобрать резисторы так, чтобы фронт волны нарастал согласно спецификации и при 100-метровой длине проводов, но это не избавляет от помех, которые влечёт за собой несимметричная электрическая реализация. Опять же, при слишком маленьком сопротивлении качество сигнала улучшается, но при этом растёт ток который необходимо пропускать устройствам через выводы для притяжки линий.
При использовании шины на модулях не существует принятого стандарта установки подтягивающих резисторов на ведущем или ведомом. У Arduino подтягивающие резисторы отсутствуют и для работы с шиной нужен хотя бы один модуль с ними. У Raspberry Pi на плате установлены подтягивающие резисторы номиналом 1,7 килоОм и для неё нет необходимости в подтяжке на модулях.
Сигналы и специальные биты шины
В состоянии покоя линии шины находятся на верхнем потенциале (обычно 3,3 В или 5 В, но могут быть и другие напряжения). Бездействие устройства, по умолчанию, воспринимается как логическая 1. Для простоты понимания можно рассмотреть аналогию: Вообразим верхний потенциал как уровень воды, а нижний как дно. Представьте, что Вы на рыбалке — попловок в состоянии покоя остаётся на поверхности, когда клюёт — идёт ко дну. Так же и в здесь, при обмене данными линии прижимаются в нулевому потециалу. Далее рассмотрим поочереди сингалы и специальные биты.
Устанавливаемые только ведущим
- Start — сигнал начала обмена данными. Линия тактирования SCL отпущена (логическая 1), ведущий пижимает линию данных SDA (переход из логической 1 в логический 0). После этого обмен данными происходит побайтово. Первый байт — семь бит адреса ведомого и бит направления (запись или чтение). Последующие байты — данные. после этого сигнала шина считается занятой.
Краткое обозначание сигнала S — заглавная буква S латинского алфавита.
- Бит Read — Если ведущий желает получить данные, он устанавливает логическую 1 сразу после адреса, информируя ведомого о том, что данные будут считываться (управление линией данных передаётся ведомому).
Краткое обозначание R — заглавная буква R латинского алфавита.
- Бит Write — Если ведущий желает записать данные, он устанавливает логический 0 сразу после адреса для информирования ведомого о том что данные будут записываться (управление линией данных остаётся у ведущего).
Краткое обозначение W̅ — заглавная буква W латинского алфавита с чертой сверху.
- Stop — сигнал окончания обмена данными. Ведущий прекращат тактирование, линия тактирования SCL отпущена (логическая 1), линия данных SDA переведена ведущим из логического 0 в логическую 1. После этого сигнала шина считается свободной.
Краткое обозначение P — заглавная буква P латинского алфавита.
- Restart — сигнал продолжения обмена данными (используется взамен сигналу Stop с последующим Start для продолжения опрашивания шины ). Используется в основном при наличии нескольких ведущих на шине, чтобы управление не перешло другому ведущему после сигнала Stop. Линия тактирования SCL отпущена ведущим, линия данных SDA переведена ведущим из логической 1 в логический 0.
Обозначается Sr — заглавная буква S и строчная буква r латинского алфавита.
Устанавливаемые ведущим и ведомым
Данные биты может устанавливат как ведущий, так и ведомый. В такой ситуации устанавливающее устройство или модуль (ведущий или ведомый) называют передатчиком, а считывающее устройство — приёмником.
- Бит ACK — (сокращ. англ. acknowledged — подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была прижата приёмником (логический 0) — принятые данные верны, передача может быть продолжена или закончена.
Обозначается A — заглавная буква A латинского алфавита
- Бит NACK — (сокращ. англ. not acknowledged — не подтверждено) каждый девятый импульс тактирования передатчик (ведущий или ведомый) отпускает линию данных. Если линия была отпущена принимающим или принимающего нет на шине (логическая 1) — принятые данные неверны, произошла ошибка, передача не может быть продолжена. Обозначается A̅ — заглавная буква A латинского алфавита с чертой сверху.
Обмен данными
При обмене данными тактированием занимается только ведущий, а ведомый может удерживать линию тактирования только если не успевает за ведущим, так называемое растягивание тактирования (clock-stretching). Не все модули поддерживают удержание. Установка бита на линии данных может происходит в момент, когда линия тактирования прижата, а считывания, когда линия отпущена (подтянута к Vcc), но в большинстве случаев это происходит по фронту волны на линии тактирования.
Рассмотрим пример простого обмена данными:
Запись в регистры ведомого. Данные взяты из примеров, приведённых выше.
После сигнала Start и указания адреса ведущий записывает адрес регистра с которого будет производиться дальнейшая запись. Стоит заметить, что у ведомого есть внутренний счётчик и каждый последующий байт после подтверждения будет записан в следующий регистр. Таким образом байт со значением 0x00 будет записан в регистр 0x11, байт со значением 0x18 будет записан в регистр 0x12, байт со значением 0x3C будет записан в регистр 0x13 и т. д. В этом примере биты ACK устанавливает ведомый.
Вот так сигналы этого примера выглядят на осциллографе:

- Канал 1 — тактирование (SCL)
- Канал 3 — данные (SDA)
- Линия B1 — декодирование данных осциллографом
Чтение из регистров ведомого. Предположим, мы хотим прочитать байт из регистра 0x13.
После сигнала Start и указания адреса ведущий записывает адрес регистра, который необходимо прочитать. Далее следует сигнал Restart (или Stop, затем Start). Ведущий снова выводит адрес ведомого, но уже с битом Read (чтения). Ведомый устанавливает бит ACK и во время следующих 8-ти импульсов тактирования выводит данные на линию SDA. На девятом импульсе уже ведущий устанавливает бит ACK (или NACK, если данные не удалось прочитать) и завершает обмен сигналом Stop.
Скорость
Первоначальный стандарт I²C был реализован на скорости 100 кГц. С тех пор появились и другие реализации шины, но большинство устройств работают на этой скорости. Так же известны случаи когда скорость шины специально снижена, чтобы увеличить расстояние передачи и уменьшить чувствительность к помехам. Не все модули могут работать на сниженной скорости.
Источник