Canbus что это такое

Статья постоянно изменяется и дополняется по мере поступления новой информации!
Как говорить делать нечего поэтому готов выложить все в едином бортовике может кому сгодиться. Так как сам искал эту информацию из разных источников. И собирал как говориться по крупицам.
Советую для начала прочитать это
www.autodela.ru/assets/fi…ina_dannih_%20CAN%20I.pdf дабы понимать дальше о чем речь.
И так речь идет об установки Автомагнитолы в целом но на примере VW POLO.
Возможно несколько вариантов подключения автомагнитол.
1. Вариант через ISO разьем без подключения к CAN шине.
Выглядит это чудо так


Ну и со стороны магнитолы обычно вот такой кусок провода

2. Вариант через разьем Quadlock они на разных авто бывают разные. С CAN шиной (в основном) и без нее.
Вот как он выглядет на VW .

И со стороны магнитолы вот сам CAN адаптер.


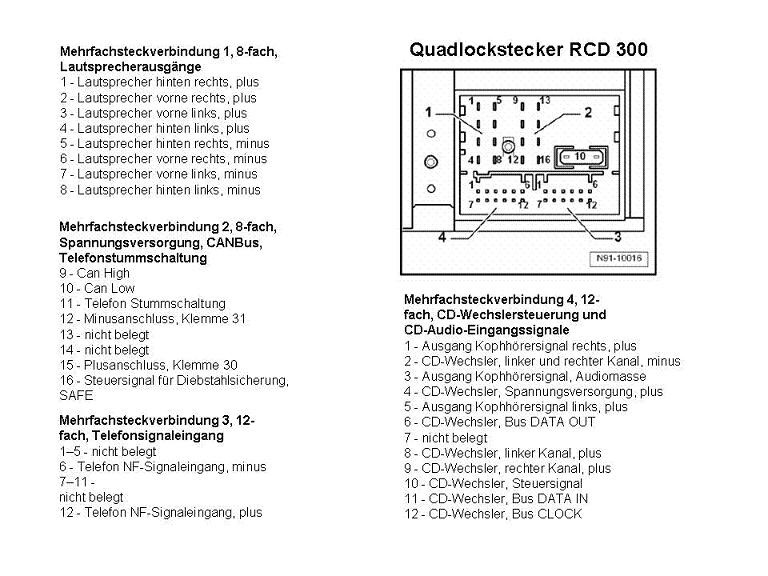
но она немного может различаться. В нашем случае это не существенные отличия так как интересуют только основные 4 провода.
И так на polo бывают несколько случаев. Есть три комплектации трейдлайн, комфорд, и хайдлайн. (не важно если не правильно произнес).
Первые две это в принципе урезанные версии. Третья же тут интересная комплектация там многие вещи могут быть а многих не быть. Но щас не об этом . Одна из опций которые нас интересует это наличие так называемой CAN шине . Многие задают вопрос есть ли она у polo или нет . Я даже слышал ответы что нет.
Давайте немного теории. Что такое CAN шина. Это сетевой интерфейс посредством которого все блоки авто общаются между собой. Это Блоку рулевого управления, блок управления двигателем, блок коробки АКПП, блок доп рулевых кнопок, блок комфорта, блок вспомогательной электроники, и т.д. блоков может быть множество. Все эти блоки между собой общаются посредством CAN шины. Это как компьютерная сеть. Поэтому не быть CAN шины в автомобиле (речь о поло и подобного класса машин) просто не может быть. Управление по CAN шине просто удобно и это экономит много лишних проводов. Даже китайцы делают свои дешевые авто с применением этой технологии. И так разобрались общее понятие CAN шина и то что она присутствует.
Другое дело подведена ли CAN шина к блоку который отсутствует. Нету в комплектации. Например на трейдлайне и комфорте нету доп кнопок на руле (а это отдельный блок) или отсутсвует климат или управление задними стеклоподьемниками. ну и магнитола стоит самая простая не требующая общения с другими блоками. Polo sedan это авто к сожалению было разработано для нас и все что в ней было возможно сэкономить, сэкономлено, даже на такой мелочи как кан шина.
Отсюда вывод. CAN шина в машине есть но она не подведена к некоторым блокам. К блоку магнитолы в том числе . Кстати на хайдлайне она должна может быть.
Понять можно в принципе по самому разьему . Если у вас ISO то скорее всего CAN не подведена. Но не факт, потому как уже встречал авто с ISO разьемом и подведенным к нему CAN шины . Если Quadlock то CAN есть скорее всего есть но опять же не факт. Встречал и без шины. Короче смотрите на распиновку. Обычно распиновка стандартная и все контакты находятся на своих местах. Кстати идеальный вариант это посмотреть распиновку родной магнитолы. Вы же наверняка меняете старую на новую. На крышке должна быть распиновка.
Теперь рассмотрим два способа подключения магнитолы.
Первый когда устанавливаем обычную магнитолу в которой нету CAN адаптера то есть через подключение к ISO разьему. Для этой магнитолы нужны вот эти провода.
Такие как:
1. Основное питание от аккумулятора. Для поддержания памяти (настройки радио, звука и так далее) и основного питания магнитолы. Обычно это желтый толстый провод. Но может быть и красный. Этот провод обязательно есть в колодке подключения магнитолы . Но если делать по уму для снижения просадки при хороших басах то это провод надо тянуть приличного сечения от аккумулятора разумеется через предохранитель который должен быть установлен до прохождения через перегородку (то есть в моторном отсеке).
2. ACC питание. оно нужно как сигнальное при включении ключа зажигания в положение ACC (это положение в поло появляется при включении зажигания а в других авто может быть первое положение ключа до включения зажигания. Но в поло режим ACC включаеться в момент включения зажигания и сохраняеться до момента вынимания ключа из замка. Необходимо это питание для активации (включения ) магнитолы и выключения ее при выключения ACC. Это удобно, сел в машину включил ключ, магнитола включилась. Вынул ключ магнитола вырубилась. Все автоматически. Можно конечно и не использовать этот провод. Например соеденить это провод с основным питанием но тогда прийдется выключать магнитолу вручную кнопкой ну и выключать также. Это жутко не удобно. Но подходит тем кто часто включает магнитолу без участия ключа. Кстати штатная магнитола RCD 220 может включаться и без ACC кнопкой питания. Но работает она тогда только час и потом отключается. Это сделано как защита от склероза. Но эта функция работает только если подведен специальный контакт от центрального блока (не буду заострять на этом внимание)
В общем провод ACC поидее красный чуть тоньше чем основное питание но бывают и желтые. Данного провода может не быть в колодке подключения магнитолы. Так как этот сигнал может быть заменен сигналом из той самой CAN шины. Если у вас его нет (например у вас подключение с использованием CAN шины) а вы устанавливаете магнитолу в которой нету CAN шины то вам придется его тянуть от замка зажигания а в VW Polo можно от прикуривателя, он как раз работает в режиме ACC. Иногда народ тупо соеденяет вместе Основное питание и ACC для того бы магнитола работала не зависимо от замка зажигания. Но лично я считаю это не правильно так как это не удобно да и таким образом можно в один прекрасный день посадить аккумулятор.
3 . Корпус ну как без него . Обычно черный. Это обычный минус. Он всегда есть во всех колодках обычно обозначен как GND.
Вот этого достаточно чтобы магнитола запустилась и работала . Но есть и другие провода необходимые магнитоле .
4. Провод ILL . Иллюминация . При появлении на этом проводе напряжения включается подсветка кнопок. Обычно на разьем приходят тоненький коричневый провод. Но его так же может не быть если подведена CAN шина. Если все же нужен это провод то его можно взять с любой кнопки подсветки.
5. Провод питания антенны ANT это провод идет не к магнитоле а от нее. используется для питания внешнего усилителя антенны или как сигнал активации выдвижной антенны. В некоторых магнитолах может не быть . Таких как штатных магнитолах VW . В них это питание реализовано внутри самой магнитолы магнитолы. Это провод еще используют для включения внешнего усилителя. Если такого провода нет то придется его брать откуда либо от того же провода АСС. Но лучше конечно от провода ANT так как питание там появляется только при включении магнитолы.
6. Так же сигнал заднего хода. Данный провод это сигнал для включения камеры заднего хода.Так же может не быть так как данный сигнал передается и по CAN шине. Либо тянуть его от концовка заднего хода или от лампы заднего хода. Тут надо более подробно разбираться и зависит от того какой именно сигнал надо подать на магнитолу.
7. Ну и акустические провода. Рассказывать о них не буду их 8 штук точнее 4 цветных пары. Обычно в отдельном разъеме. Если у вас только передние динамики то их будет только 2 пары.
Ну не знаю по моему все вспомнил, есть и другие но это более углубленно и редко используются.
И второй вариант с подключением по CAN шине. с гнездом Quadlock.
1. Понятное дело основное питание. Как же без него.
2. Минус. ну тут тоже понятно.
3. два провода CAN шины .
4. Ключ (иногда он есть иногда нету.) Зависит от магнитолы.
4. Акустические провода .
Вот и все . Как видно с использованием CAN шины все как бы проще.
Все . Все остольные сигналы как включения камеры, подсветка, открытие дверей, отображение настроек климата, управление кнопками на руле и так далее все происходит по CAN шине. И если у вас магнитола с Quadlock гнездом то разумеется вам нужно это подключение и нужно чтобы на авто была подведена CAN шина и установленный Quadlock разьем. Исключением может быть случай когда у вас магнитола использует внешний адаптер CAN адаптер (обычно это китайские магнитолы). В таком случае такую магнитолу можно подключить и к ISO разьему убрав CAN адаптер. Для этого просто изучите распиновку разъема возле самого ГУ и сопоставите с описанием выше двух способов.
На VW polo, как я и писал выше может быть два варианта . У вас установлен ISO разьем без подведенной CAN шины. И Второй вариант с разьемом Quadlock с CAN шиной. Хорошо если у вас все совпало. То просто подключаем и наслаждаемся звуком но вот если нет. Тем более если у вас стоит Quadlock то есть варианты что на нем не будут некоторые доп сигналы. Тут надо подходить индивидуально .
Но бывают варианты когда нужно подключить магнитолу с Quadlock гнездом к авто в котором нету Quadlock разьема в место него ISO разьем нету CAN шины а надо поставить штатное ГУ в котором Quadlock гнездо и соответственно необходимо наличие CAN шины. Вот об этом варианте и речь ниже.
Ну в принципе если есть руки и голова то все можно сделать. Для начала надо определиться каким путем мы пойдем. Первый как я считаю правильный это взять удалить ISO разьем и вместо него поставить Quadlock. Это не значит что вам прийдеться резать и паять. Нет все гараздо проще. Для начала разыскиваем сам Quadlock разьем . Их можно купить на али экспресе вместе с кусками проводов. Или на разборке. но берите именно с кусками проводов. На 2 штуки понадобиться. Берем две распечатки распиновки разьема.
Современные автомобильные аудиосистемы постоянно совершенствуются, добавляются дополнительные динамики, цифровые усилители, сабвуферы и пр.
Для подключения сторонних устройств необходимы специальные переходники (can-bus адаптеры), которые позволяют задействовать все функции и реализовать требования бортовой системы автомобиля.
Can-bus адаптер управляет запуском цифрового усилителя (Pioneer, Rockford, BOSE, KIA, JBL), отправляет сигнал для активации камеры заднего вида, с информацией от парковочной системы, управляет трип компьютером и позволяет отображать всю эту информацию экране мультимедиа (информация о режиме, радио частоте, воспроизведенных треках).
В зависимости от автомобиля can-bus адаптеры выполняют различные функции.
В автомобилях Toyota, в которых присутствует усилитель, используется адаптер для его полноценной работы с магнитолой. Адаптер позволяет управлять «звуковой схемой» автомобиля – регулировать громкость звука между передними и задними колонками, левой и правой стороной автомобиля, а также громкостью самого усилителя. В большинстве производимых и продаваемых головных устройств данная функция не предусмотрена.
Особо стоит отметить can-bus адаптер для KIA Sorento и KIA Sportage, в которых установлен цифровой усилитель. В этом случае передача звука в цифровом виде исключает любые наводки, шумы и помехи.
Нужно быть готовым к тому, что магнитолы, которые не имеют адаптеров для работы с цифровым усилителем, будут подключаться напрямую к колонкам. При такой схеме подключения вы лишаетесь усилителя, а вместе с ним и надежды на качественный звук. Единственной гарантией правильной установки может быть can-bus адаптер, который будет установлен в автомобиле для сопряжения с цифровым усилителем.
В автомобилях Volkswagen/Skoda сигнал разрешения включения аксессуаров (ACC), кнопки рулевого управления, подсветка и прочие сигналы передаются через can шину автомобиля. Без использования правильного can-bus адаптера необходимо серьезное вмешательство во внутреннюю проводку авто, учитывая все последствия такого вмешательства. Также на экране максидот в авто должны отображаться номер радиостанции и прочая информация о состоянии магнитолы.
В автомобилях Mazda can-bus адаптер нужен для работы трип компьютера, а также для подключения и правильного функционирования усилителя. При замене головного устройства и установки адаптера кнопка INFO переносится на руль, что делает управление магнитолой более комфортным. Более того, в некоторых версиях Mazda 3 (арабская, китайская, бразильская сборка), где функция вывода данных от трип компьютера не предусмотрена, устанавливая магнитолу и can-bus адаптер вы получаете новые функции в вашем автомобиле — трип компьютер (средний и мгновенный расход топлива, запас хода, среднюю скорость и т.п.). Таким образом, вы получаете не только качественный звук, навигацию, но и расширяете функциональность своего автомобиля.
Can-bus адаптер для автомобилей Mitsubishi (Pajero, Outlander XL, ASX, LancerX) выполняет функцию подключения магнитолы к цифровому усилителю Rockford.
В цифровых усилителях Rockford Fosgate, которыми комплектуются автомобили Mitsubishi, должен быть реализован следующий функционал:
— пятиступенчатая регулировка сабвуфером
— регулировка баланса звука: фронт-тыл, лево-право
— постановка усилителя в режим MUTE
— отключение усилителя, когда он не используется.
Покупая штатную магнитолу убедитесь, что после ее установки вы не потеряете исходный функционал. Любое усовершенствование в автомобиле должно улучшать его, а не наоборот. Использование качественных can-bus адаптеров позволит не только грамотно установить магнитолу, но и расширить функциональность вашего авто.
CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях. Стандарт для автомобильной автоматики.
Содержание
Описание стандарта [ править | править код ]
Непосредственно стандарт CAN компании Bosch определяет передачу в отрыве от физического уровня — он может быть каким угодно, например, радиоканалом или оптоволокном. Но на практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары, определённым в стандарте ISO 11898. Передача ведётся кадрами, которые принимаются всеми узлами сети. Для доступа к шине выпускаются специализированные микросхемы — драйверы CAN-шины.
Общие сведения [ править | править код ]
CAN является синхронной шиной с типом доступа Collision Resolving (CR, разрешение коллизии), который, в отличие от Collision Detect (CD, обнаружение коллизии) сетей (Ethernet), детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Рецессивные и доминантные биты [ править | править код ]
Для абстрагирования от среды передачи спецификация CAN избегает описывать биты данных как «0» и «1». Вместо этого применяются термины «рецессивный» бит и «доминантный» бит, при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня на радиоканале отсутствие сигнала означает рецессивный бит, а наличие — доминантный; тогда как в типичной реализации проводной сети рецессив бывает при наличии сигнала, а доминант, соответственно, при отсутствии. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (доминантный узел сети «подтягивает» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантное может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя).
Виды кадров [ править | править код ]
- Кадр данных (data frame) — передаёт данные;
- Кадр удаленного запроса (remote frame) — служит для запроса на передачу кадра данных с тем же идентификатором;
- Кадр перегрузки (overload frame) — обеспечивает промежуток между кадрами данных или запроса;
- Кадр ошибки (error frame) — передаётся узлом, обнаружившим в сети ошибку.
Кадры данных и запроса отделяются от предыдущих кадров межкадровым промежутком.
Формат кадра [ править | править код ]
Базовый формат кадра данных [ править | править код ]
| Поле | Длина (в битах) | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 | Сигнализирует начало передачи кадра |
| Идентификатор | 11 | Уникальный идентификатор |
| Запрос на передачу (RTR) | 1 | Должен быть доминантным |
| Бит расширения идентификатора (IDE) | 1 | Должен быть доминантным (определяет длину идентификатора) |
| Зарезервированный бит (r0) | 1 | Резерв |
| Длина данных (DLC) | 4 | Длина поля данных в байтах (0-8) |
| Поле данных | 0-8 байт | Передаваемые данные (длина в поле DLC) |
| Контрольная сумма (CRC) | 15 | Контрольная сумма всего кадра |
| Разграничитель контрольной суммы | 1 | Должен быть рецессивным |
| Промежуток подтверждения (ACK) | 1 | Передатчик шлёт рецессивный, приёмник вставляет доминанту |
| Разграничитель подтверждения | 1 | Должен быть рецессивным |
| Конец кадра (EOF) | 7 | Должен быть рецессивным |
Первые 7 бит идентификатора не должны быть все рецессивными.
Расширенный формат кадра данных [ править | править код ]
| Поле | Длина (в битах) | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 | Сигнализирует начало передачи кадра |
| Идентификатор A | 11 | Первая часть идентификатора |
| Подмена запроса на передачу (SRR) | 1 | Должен быть рецессивным |
| Бит расширения идентификатора (IDE) | 1 | Должен быть рецессивным (определяет длину идентификатора) |
| Идентификатор B | 18 | Вторая часть идентификатора |
| Запрос на передачу (RTR) | 1 | Должен быть доминантным |
| Зарезервированные биты (r1 и r0) | 2 | Резерв |
| Длина данных (DLC) | 4 | Длина поля данных в байтах (0-8) |
| Поле данных | 0-8 байт | Передаваемые данные (длина в поле DLC) |
| Контрольная сумма (CRC) | 15 | Контрольная сумма всего кадра |
| Разграничитель контрольной суммы | 1 | Должен быть рецессивным |
| Промежуток подтверждения (ACK) | 1 | Передатчик шлёт рецессивный, приёмник вставляет доминанту |
| Разграничитель подтверждения | 1 | Должен быть рецессивным |
| Конец кадра (EOF) | 7 | Должен быть рецессивным |
Идентификатор получается объединением частей A и B.
Формат кадра удаленного запроса [ править | править код ]
Совпадает с кадрами данных стандартного или расширенного формата, за двумя исключениями:
- В поле RTR рецессив вместо доминанты.
- Отсутствует поле данных.
Арбитраж доступа [ править | править код ]
При свободной шине любой узел может начинать передачу в любой момент. В случае одновременной передачи кадров двумя и более узлами проходит арбитраж доступа: передавая идентификатор, узел одновременно проверяет состояние шины. Если при передаче рецессивного бита принимается доминантный — считается, что другой узел передаёт сообщение с большим приоритетом, и передача откладывается до освобождения шины. Таким образом, в отличие, например, от Ethernet в CAN не происходит непроизводительной потери пропускной способности канала при коллизиях. Цена этого решения — возможность того, что сообщения с низким приоритетом никогда не будут переданы.
Контроль ошибок [ править | править код ]
CAN имеет несколько механизмов контроля и предотвращения ошибок:
- Контроль передачи: при передаче битовые уровни в сети сравниваются с передаваемыми битами.
- Дополняющие биты (bit stuffing): после передачи пяти одинаковых битов подряд автоматически передаётся бит противоположного значения. Таким образом кодируются все поля кадров данных или запроса, кроме разграничителя контрольной суммы, промежутка подтверждения и EOF.
- Контрольная сумма: передатчик вычисляет её и добавляет в передаваемый кадр, приёмник считает контрольную сумму принимаемого кадра в реальном времени (одновременно с передатчиком), сравнивает с суммой в самом кадре и в случае совпадения передаёт доминантный бит в промежутке подтверждения.
- Контроль значений полей при приёме.
Разработчики оценивают вероятность невыявления ошибки передачи как 4,7×10 −11 .
Скорость передачи и длина сети [ править | править код ]
Диапазон скоростей [ править | править код ]
Все узлы в сети должны работать с одной скоростью. Стандарт CAN не определяет скоростей работы, но большинство как отдельных, так и встроенных в микроконтроллеры адаптеров позволяют плавно менять скорость в диапазоне, по крайней мере, от 20 килобит в секунду до 1 мегабита в секунду. Существуют решения, выходящие далеко за рамки данного диапазона.
Предельная длина сети [ править | править код ]
Приведённые выше методы контроля ошибок требуют, чтобы изменение бита при передаче успело распространиться по всей сети к моменту замера значения. Это ставит максимальную длину сети в обратную зависимость от скорости передачи: чем больше скорость, тем меньше длина. Например, для сети стандарта ISO 11898 предельные длины составляют приблизительно:
| 1 Мбит/с | 40 м |
| 500 кбит/с | 100 м |
| 125 кбит/с | 500 м |
| 10 кбит/с | 5000 м |
Использование оптопар для защиты устройств от высоковольтных помех в сети ещё больше сокращает предельную длину, тем больше чем больше задержка сигнала в оптопаре. Сильно разветвлённые сети (паутина) также снижают скорость из-за множества отражений сигнала и большей электрической ёмкости шины.
Протоколы высокого уровня [ править | править код ]
Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах: передачи данных длиннее 8 байт, автоматического распределения идентификаторов между узлами, единообразного управления устройствами различных типов и производителей. Поэтому вскоре после появления CAN на рынке начали разрабатываться протоколы высокого уровня для него. В число распространённых на данный момент протоколов входят:
Применение CAN в автомобилестроении [ править | править код ]
Во всех высокотехнологичных системах современного автомобиля применяется CAN-протокол для связи ЭБУ с дополнительными устройствами и контроллерами исполнительных механизмов и различных систем безопасности. В некоторых автомобилях CAN связывает IMMO, приборные панели, SRS блоки и т. д.
Также протокол CAN ISO 15765-4 вошел в состав стандарта OBD-II.
Источник