Шина lin в бмв
Диагностика и ремонт: Шина системы Lin
В середине 90-х годов для обеспечения безопасности и комфорта на автомобиле «представительского» класса могло быть от 10 до 15 блоков управления.
В настоящее время такого количества блоков управления уже недостаточно, оно увеличилось, возможно, в два раза (или больше).
Такое стремительное увеличение количества блоков управления заставило производителей искать новые пути решения задач для поддержания бесперебойной и стабильной связи между блоками управления.
И в настоящий момент уже существуют следующие технологии передачи данных:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetoot h
В данной статье мы рассмотрим шину LIN .
Шина под названием » LIN » — это сокращение от полного названия: » Local Interconnect Network «, то есть, «локальная коммутируемая сеть».
Это означает. что все коммутируемые блоки управлению подключены и располагаются в пределах одного ограниченного пространства, например, крыши автомобиля, двери автомобиля и так далее.
Обмен данными между коммутируемыми блоками системы LIN происходят по шине данных CAN .
У шины LIN есть особенность: она однопроводная.
Цвет изоляции провода — фиолетовый (на нем может быть цветная маркировка).
Толщина провода (площадь поперечного сечения) составляет около 0.35 мм2.
Провода шины LIN экранировать не обязательно.
Однако, как уже говорилось, скорости передачи данных по шине CAN и шине LIN различные.
Различными также являются и сигналы.
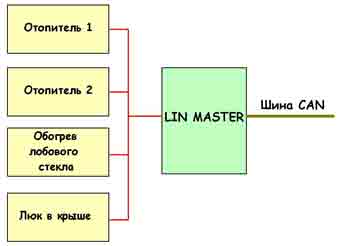
Для этого был придуман так называемый «Блок управления LIN-Master «, который является своеобразным «переводчиком» между шиной LIN и шиной CAN :
У этого блока существует довольно много задач:
— контроль передачи данных
— контроль скорости передачи данных
— постоянная диагностика работоспособоности всех блоков, подключенных к шине LIN
Итак, что такое LIN Master мы разобрались.
Но есть еще такое понятие, как LIN Slave .
Это не что иное, как исполнительные механизмы, электронные или электронномеханические узлы или блоки, получающие команды от блока LIN Master .
Но не только команды.
Может (и постоянно идет) опрос всех подключенных компонентов по текущему и фактическому состоянию, для своевременного обнаружения неисправности и возможности выполнять заданные функции.
Как видно из фото 1, для нескольких исполнительных механизмов требуется только один контакт () в блоке pin LIN Master .
Скорость передачи данных в шине LIN невысокая и составляет приблизительно от 5 до 25 кбит\сек.
Рецессивный уровень
Если на шину данных LIN не будет послана телеграмма или рецессивный бит, то на шину данных подается напряжение, практически равное напряжению аккумуляторной батареи.
Для передачи доминирующего бита по шине данных LIN в передающем блоке управления шина данных замыкается на массу через приемопередатчик (трансивер) — см. фото 2 :
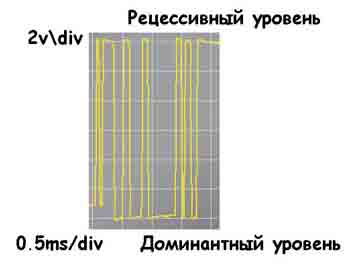
Надежность и стабильность передачи данных обеспечивается установлением определенных допусков в сигналах на рецессивном и доминантном уровнях.
Между блоками Slave и Master постоянно «курсируют» телеграммы определенной формы.
Блок управления LIN Master периодически посылает телеграммы, которые строго разделены на четыре составляющие:
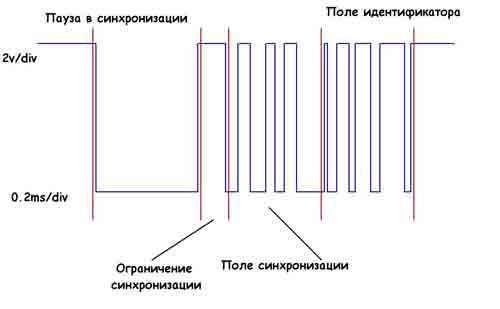
1 — пауза в синхронизации
2 — ограничение синхронизации
3 — поле синхронизации
4 — поле идентификатора
В посланной телеграмме, так называемая «пауза в синхронизации» нужна для того, что бы «сообщить» блокам о том, что посылается телеграмма. Минимальная пауза в синхронизации равняется времени передачи 13 битов. Пауза посылается с доминантным уровнем.
Поле синхронизации требуется для того, что бы все исполнительные блоки могли настроиться или проверить свои настройки перед приемом телеграммы — оно состоит из строго определенной последовательности битов 0101010101.
Источник
Что такое шина LIN
Шина LIN – это простая последовательная однопроводная шина для автомобильных применений и используется в тех случаях когда применение CAN шины – дорого. По шине LIN управляются различные приводы (корректоры фар, заслонки климатической системы, приводы центрального замка), а так же собирается информация с простых датчиков (датчики дождя, света, температуры).
Для изучения шины LIN Вы можете использовать наш адаптер CAN-Hacker 3.0 с дополнительной опцией LIN анализатора.
А так же интерфейс CAN-Hacker CH-P
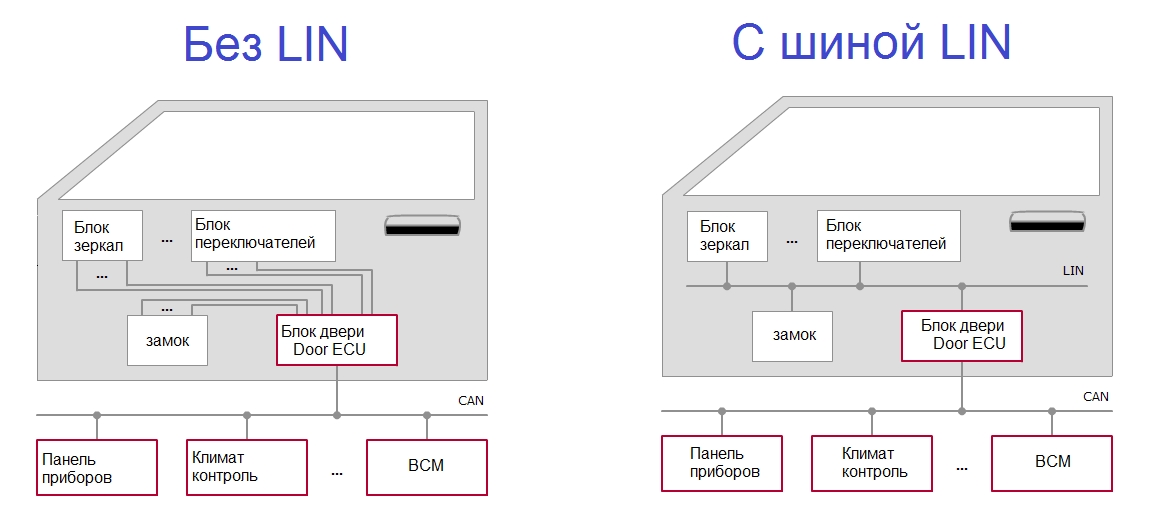
Пример системы управления дверью с шиной LIN и без нее:
Еще пример, в автомобиле Porsche Macan 2015 г. все привода и датчики климатической системы подключены к шине LIN а сам блок климат контроля связан с автомобилем при помощи CAN шины.
Дешевизна LIN обусловлена тем что реализация протокола LIN полностью программная и строится на базе обычного UART (родственник RS232, COM порт). Так же LIN не требует применения точных времязадающих цепей – кварцевых резонаторов и генераторов. Поэтому можно применять дешевые микроконтроллеры.
Скорость передачи данных
Скорость передачи данных на шине LIN стандартная для устройств построенных на базе UART: 2400; 9600; 10400; 19200; 20000 Бод. Это немного но достаточно для передачи данных от датчиков и для управления медленными механизмами.
Электрическая реализация LIN
Электрически интерфейс LIN реализован так же просто. В каждом узле линия шины подтянута к шине питания +12V. Передача осуществляется опусканием уровня шины до уровня массы GND. Микроконтроллер подключается к шине LIN при помощи специальной микросхемы Трансивера, например TJA1021
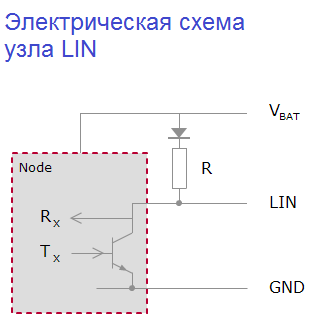
Подключение LIN трансивера к микроконтроллеру
![]()
Архитектура сети LIN
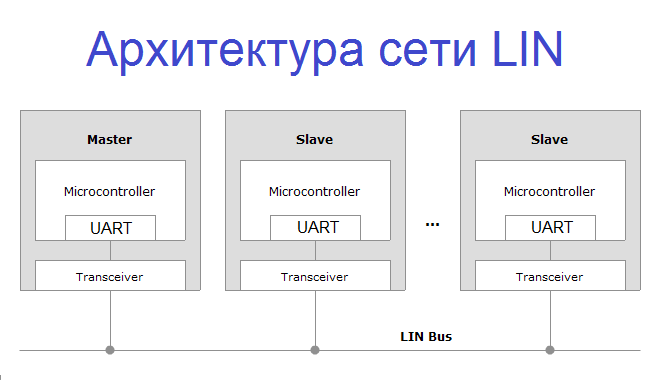
Особенностью шины LIN является то, что в сети присутствует два вида узлов: Master и Slave, Master – ведущий, Slave – подчиненный.
Master может опрашивать Slave о его состоянии, будить его, отправлять ему команды. Обмен информации на шине LIN происходит в формате обмена пакетами, и на первый взгляд может показаться что механизм идентичен шине CAN, это не так. Объясняем почему:
Структура LIN пакета выглядит так:
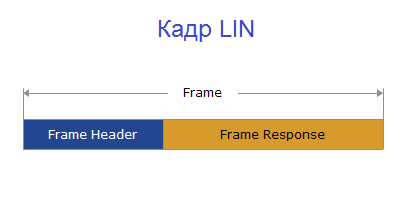
Frame – Header – заголовок кадра, который отправляется в шину Мастером. Включает в себя ID кадра
Frame – Response – данные которые отправляет Slave в ответ на запрос Master -а.
Уловите разницу – в шине CAN все узлы передают и ID кадра и данные. В шине LIN – заголовок пакета это задача Мастер-узла.
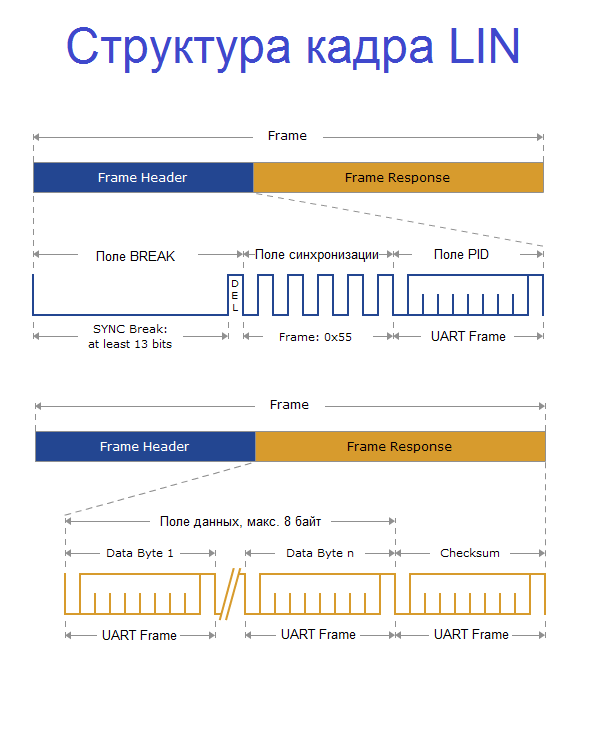
Поле Frame-Header состоит из полей:
BREAK – Это сигнал шине о том что мастер сейчас будет говорить
Поле синхронизации – это просто байт = 0x55. При его передаче приемники подстраивают свою скорость.
PID – это поле защищенного идентификатора. В дальнейшем будем писать просто – идентификатор.
Идентификатор может принимать значения от 0 до 59 (0x3B в HEX) для пользовательских пакетов. Так же возможно использование специальных служебных пакетов с ID 0x3C, 0x3D, 0x3E и 0x3F. Защищенность идентификатора заключена в следующем:

В структуре байта ID мы видим биты собственно самого идентификатора с ID0 по ID5, а затем идут два контрольных бита P0 и P1, которые рассчитываются так:
P0 = ID0 ⊕ ID1 ⊕ ID2 ⊕ ID4
P1 = ¬ (ID1 ⊕ ID3 ⊕ ID4 ⊕ ID5)
Если в PID контрольные биты рассчитаны неверно то пакет не будет обработан принимающей стороной.
В случае если мы будем эмулировать работу какого либо узла Master, предварительно изучив отправляемые им данные при помощи LIN сниффера, то нам не придется задумываться о расчете контрольных битов ID, поскольку в пакетах которые мы видим сниффером все уже посчитано до нас.
После того как Slave принял Header мастера он отвечает полем Frame Response который состоит из байтов данных в количестве от 1 до 8 и байта контрольной суммы.
Контрольная сумма (CRC) считается как инвертированная сумма всех байтов данных с переносом либо сумма всех байтов данных + значение защищенного ID . В первом случае CRC называется классической, во втором – расширенной. Вариант подсчета контрольной суммы определяется версией стандарта шины LIN. В версиях 1.xx применяется классический алгоритм, в версиях 2.xx применяется расширенный.
Обратите внимание на отсутствие поля DLC отвечающего за количество байтов данных как в CAN шине. В шине LIN количество байтов данных определяется на этапе написания ПО контроллера. Поэтому процесс обмена на шине LIN сложнее анализировать при помощи сниффера – приходится вводить специальный алгоритм разделения пакетов, который угадывает сколько байтов данных было в принятом пакете.
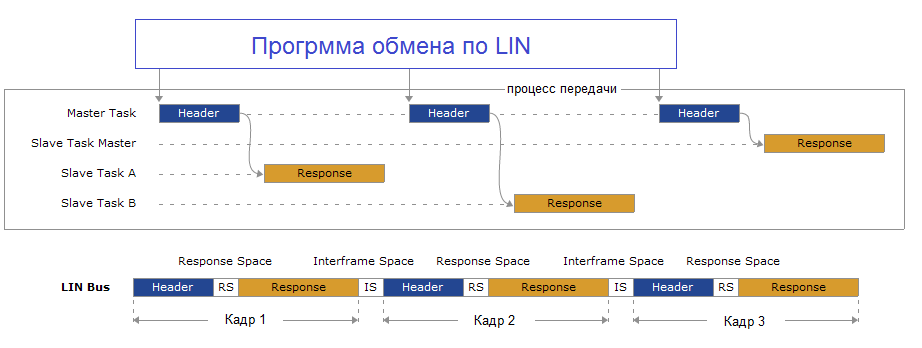
На этой схеме мы видим как один Мастер общается с двумя узлами Slave. Обратите внимание на третий кадр, в нем заголовок Header и тело пакета Response передает Мастер – это важный момент, такие кадры используются для диагностики и конфигурирования Slave узлов.
На осциллограмме обмен одного Master и одного Slave выглядит так:
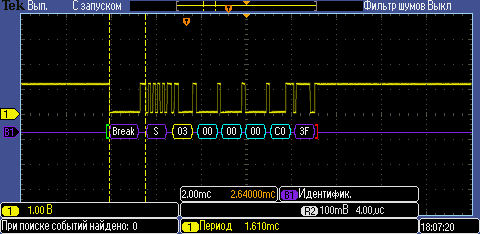
Здесь мы видим запрос мастера состоящий из полей Break – S – затем следует ответ узла Slave состоящий из четырех байт и контрольной суммы равной 0x3F.
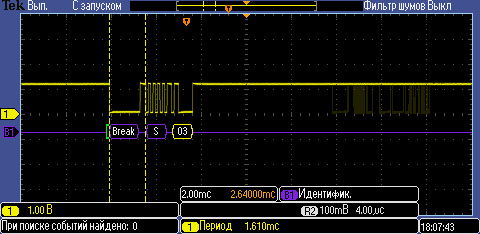
Если мы отключим узел Slave от шины LIN, то увидим уже такую осциллограмму:
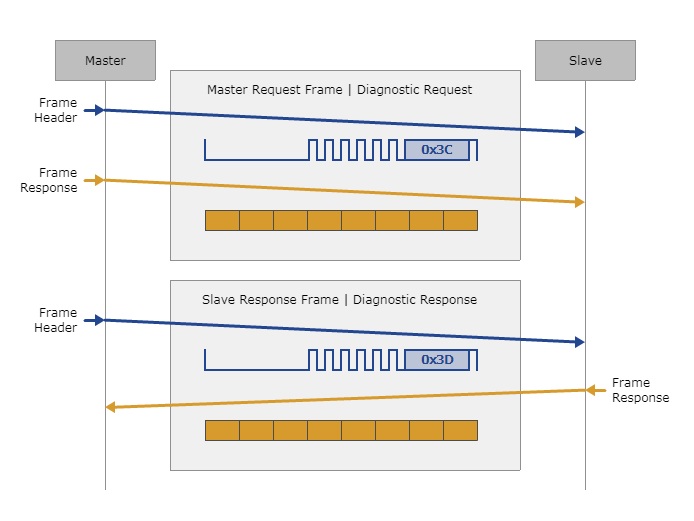
Так же в протоколе шины LIN предусмотрены и специальные служебные пакеты служащие для диагностики шины, пробуждения устройств и других функций. В этом случае Master может передавать как Frame Header так и Frame Response последовательно, тогда пакет Master -а может иметь такой вид:
ID=0x3C DATA : FF FF FF FF FF FF FF FF
Обмен диагностическими сообщениями на шине LIN выглядит так :
При помощи длинных пакетов Master может конфигурировать и программировать узлы Slave. Если для программирования или конфигурирования узла LIN необходимо более 8 байт, то поток данных сегментируется и пересылается частями. Механика передачи данных определяется специальным транспортным протоколом работающим поверх физики шины LIN, о нем мы напишем в следующих статьях.
Видео пример работы с шиной LIN и адаптером CAN-Hacker 3.2
Источник
Автомобильный справочник
для настоящих любителей техники
LIN шина

LIN протокол разработан для создания дешевых локальных сетей обмена данными на коротких расстояниях. Он служит для передачи входных воздействий, состояний переключателей на панелях управления, а также ответных действий различных устройств, соединенных в одну систему через LIN.
Первая спецификация стандарта под брендом LIN была издана в 1999 году по инициативе консорциума европейских автопроизводителей и других известных компаний, включая Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc., Volcano Communications Technologies AB, Volkswagen AG и VolvoCar Corporation. Последняя спецификация, LIN 2.2, издана в 2010 году. В настоящее время документы стандарта переданы под контроль Международной организации по стандартизации (ISO), где стандарту был присвоено новое наименование ISO 17987. В связи с политикой ISO копия стандарта стала платной.

Шина LIN
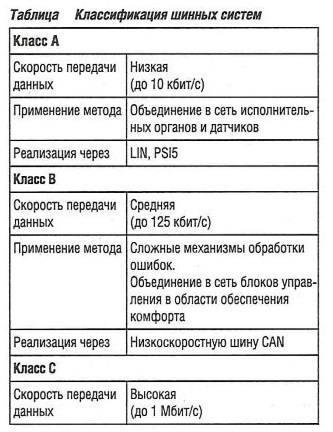
LIN шина (локальная сеть воздействия) была разработана для удовлетворения потребностей в связи для систем класса А (см. табл. «Классификация шинных систем» ) с использованием самого экономичного оборудования. Типичные области применения:
- Дверной модуль с дверным замком;
- Приводы стеклоподъемников;
- Регулировка боковых зеркал заднего вида;
- Система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
Текущую спецификацию LIN можно найти на сайте консорциума LIN.
 |  |
Важные особенности шины LIN:
- Концепции с одним ведущим и несколькими ведомыми устройствами;
- Небольшая стоимость оборудования за счет передачи данных по неэкранированному однопроводному кабелю;
- Самосинхронизация ведомых устройств без кварцевого генератора;
- Связь в виде очень коротких сообщений;
- Скорость передачи данных до 20 кбит/с;
- Длина шины до 40 м, до 16 узлов.
Система передачи в шине LIN
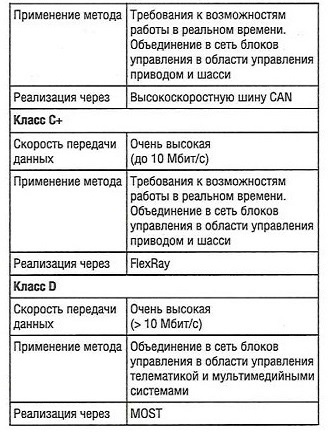
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. 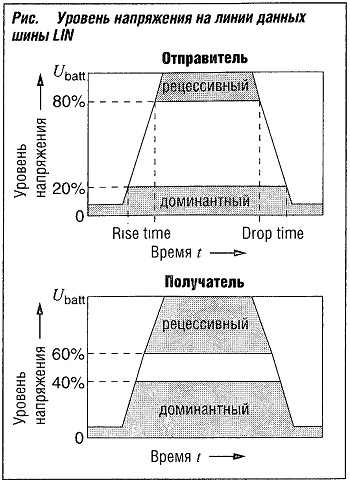 Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Из-за наличия разных вариантов электрических цепей уровни могут быть разными. Определение допусков на передачу и прием в области рецессивных и доминантных уровней обеспечивает стабильную передачу данных. Диапазоны допусков шире на приемном конце (рис. «Уровень напряжения на линии данных шины LIN» ), чтобы действительные сигналы тоже можно было получать, несмотря па излучаемые помехи.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN. Рекомендуется не более 16 узлов.
Пользователи шины обычно располагаются в линейной топологии; однако эта топология не является обязательной.
Доступ к шине LIN
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Во время обмена сообщениями между ведущим и ведомым устройством возможны следующие взаимосвязи:
- Сообщение с ответом ведомого: ведущее устройство передает сообщение одному или нескольким ведомым устройствам и запрашивает данные (например, состояния измеренных значений);
- Сообщение с инструкцией ведущего: ведущее устройство передает инструкции ведомому устройству (например, включение сервопривода);
- Сообщение для использования: ведущее устройство инициирует связь между двумя ведомыми устройствами.
Протокол LIN
Фрейм данных LIN
 Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Заголовок
Заголовок состоит из разрыва синхронизации, поля синхронизации и поля идентификации.
Синхронизация LIN
Синхронизация происходит в начале каждого фрейма для обеспечения последовательной передачи данных между ведущим и ведомыми устройствами. Сначала разрывом синхронизации четко определяется начало фрейма. Он состоит из не менее 13 последовательных доминантных уровней и одного рецессивного уровня.
После разрыва синхронизации ведущее устройство передает поле синхронизации, состоящее из последовательности битов 01010101. Это дает ведомым устройствам возможность адаптироваться к временной оси ведущего. Тактовый импульс ведущего устройства не должен отличаться от номинального значения более чем на ±0,5%. Тактовый импульс ведомых устройств перед синхронизацией может иметь разброс ±15 %, если синхронизация к концу сообщения достигает уровня ±2 %. Таким образом, ведомым устройствам не нужен дорогой кварцевый генератор — они могут быть выполнены, например, с экономичной резистивно-емкостной цепью.
Идентификатор LIN
Третий байт в заголовке служит идентификатором LIN. По аналогии с шиной CAN здесь используется адресация по содержанию — идентификатор дает информацию о содержании сообщения. Все подключенные к шине узлы на основании этой информации решают, намерены ли они получить и обработать сообщение или же проигнорировать его (фильтрация при приемке).
Шесть или восемь битов в поле идентификатора определяют сам идентификатор; из них получается 64 возможных идентификатора (ID). Имеются следующие значения:
- ID = 0 — 59: передача сигналов;
- ID = 60: запрос команд и диагностики от ведущего устройства;
- ID = 61: отклик ведомого устройства на ID 60;
- ID = 62: зарезервирован для связи с изготовителем;
- ID = 63: зарезервирован для будущих расширений протокола.
Из 64 возможных сообщений 32 могут содержать только два байта данных, 16 — четыре байта данных, и остальные 16 — восемь байтов данных.
Последние два разряда в поле идентификации содержат контрольные суммы, защищающие идентификатор от ошибок при передаче и неправильного распределения сообщений.
Поле данных
После передачи ведущим устройством заголовка начинается передача фактических данных. Ведомые устройства по переданному идентификатору определяют, являются ли они адресатами и, при необходимости, отправляют ответ в поле данных.
В один фрейм можно включить несколько сигналов. Здесь у каждого сигнала есть один генератор, т.е. он всегда описывается одним и тем же узлом сети. Во время работы не разрешается сопоставлять сигналу другой генератор, что возможно в других сетях с управлением по времени.
Данные в ответе ведомого устройства защищаются контрольной суммой (CS).
Описательный файл LIN
Конфигурация шины LIN, т.е. спецификация пользователей сети, сигналов и фреймов, выполняется в описательном файле LIN. Спецификация LIN для этой цели имеет подходящий язык конфигурации.
Из описательного файла LIN автоматически генерируется набор кодов на С и файлов заголовков; эти коды и файлы используются для реализации функций ведущего и ведомых устройств в ЭБУ, расположенных на шине. Таким образом, описательный файл LIN служит для конфигурации всей сети LIN. Это общий интерфейс между автопроизводителем и поставщиками ведущих и ведомых устройств.
Составление графика отправки сообщений
Таблица-график в описательном файле LIN определяет порядок и время отправки сообщений. Часто запрашиваемая информация отправляется время от времени. Когда таблица проработана, ведущее устройство снова начинает с первого сообщения. Последовательность обработки можно изменить в зависимости от режима работы (например, активна/неактивна диагностика, включено/ выключено зажигание).
Таким образом, известен фрейм передачи каждого сообщения. Детерминированные характеристики гарантируются тем фактом, что все передачи инициируются ведущим Устройством в случае управления доступом по принципу «ведущий-ведомый».
Управление сетью LIN
Для минимизации тока замкнутой цепи узлы сети LIN можно переводить в спящий режим. Это можно сделать двумя способами. Ведущее устройство передает команду «перейти в спящий режим» зарезервированным идентификатором 60, либо ведомые устройства переходят в спящий режим автоматически, если в течение относительно длительного времени (4 секунды) не было передачи данных по шине. И ведущее, и ведомые устройства могут снова активировать сеть. Для этого необходимо передать сигнал активации. Он состоит из байта данных с номером 128, обозначающим содержание. После перерыва времени бита 4-64 (разграничитель активации) все узлы должны быть инициализированы и способны ответить ведущему устройству.
Источник