Диагностика CAN шины
Поскольку все современные автомобили имеют несколько конфигураций шин данных, диагносты и автоэлектрики сталкиваются все чаще с неисправностями, связанными именно с передачей данных. Как правило, симптомом может быть отсутствие коммуникации с каким-то блоком, повторяющиеся «U» коды в нескольких блоках, относящихся к одной шине. Это может сопровождаться многочисленными активными лампами неисправностей на панели приборов.
Сегодня мы будем обсуждать неисправности шины CAN. Существует несколько способов определения ее целостности и нормальной коммуникации. Удобнее всего это делать осциллографом. Но не все осциллографы настолько быстры, чтобы читать пакеты в шинах данных. Некоторые сканеры также имеют встроенную функцию проверки целостности CAN шины, например, G-scan 3:
В этой статье мы расскажем о быстром способе диагностики CAN шины с помощью мультиметра через диагностический разъём. Он занимает немного времени и в любом автосервисе всегда есть мультиметр. Итак, пошаговая инструкция:
ШАГ 1: «Проверка Низкоскоростной CAN Шины на замыкание»:
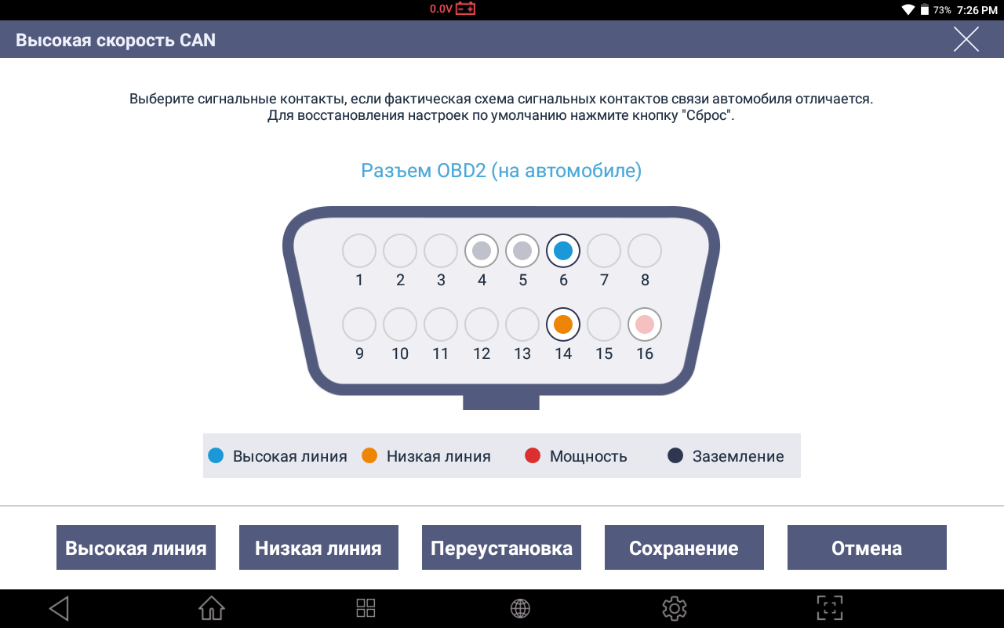
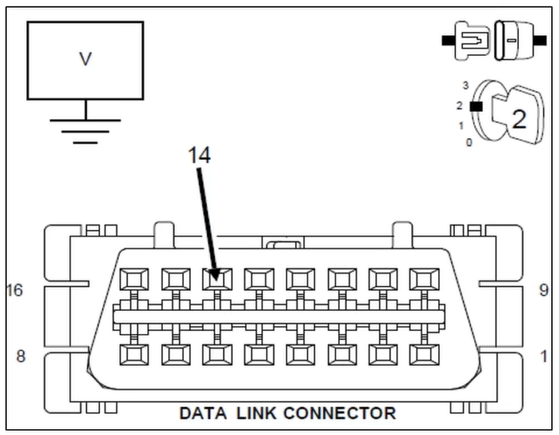
Отключаем сканер от розетки. Переводим ключ зажигания в положение 2 (ВКЛ). С помощью мультиметра измеряем напряжение (ПИН 14 на розетке и ЗЕМЛЯ). Есть ли у нас напряжение 10,0 вольт?
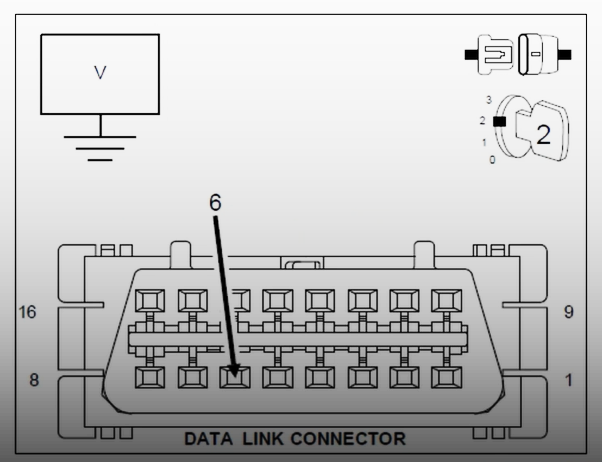
ШАГ 2: «Проверка Низкоскоростной CAN Шины на замыкание на землю»:
Находим ПИН 6 на розетке и второй шуп осциллографа подключаем к плюсовой клемме АКБ. Есть ли у нас 0 вольт? Если мы находим тут 0 вольт, то начинаем отключать модули по одному, пока не появится напряжение. Если оно так и не появилось, то проблема в проводке CAN шины и необходимо определить место предполагаемого замыкания и поменять витую пару.
ШАГ 3: «Проверка терминирующих сопротивлений»:
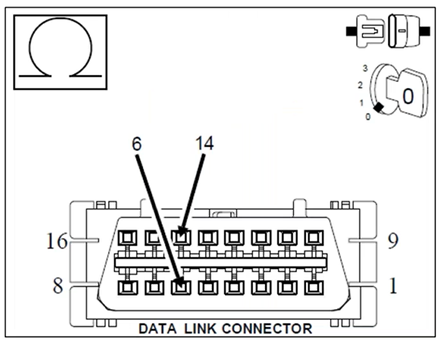
Выключаем зажигание. Отключаем минусовую клемму аккумулятора. Переводим мульттимтер в режим измерения сопротивления и измеряем Сопротивление между высокой и низкой CAN шинами (между ПИНами 6 и 14). Получается ли сопротивление в диапазоне 53,5 — 67 Ом? Если ДА, то тест завершен. Если проблема остаётся, то значит она отсутствует на момент измерения и носит спорадический характер. Обратитесь к электросхеме автомобиля, проверьте коннекторы и другие элементы проводки на наличие окисления коннекторов, перегибов, старых отверстий от накола щупом осциллографа, возможности проникновения воды или коррозии. Проверьте целостность мест соединения. Если сопротивление не в диапазоне 53,5 — 67 Ом, то перейдите к следующему шагу.
ШАГ 4: «Высокое сопротивление цепи — более 67 Ом»:
Если измеренное сопротивление выше 67 Ом, то у нас высокий сигнал цепи CAN HIGH или LOW, её разрыв или один из терминирующих резисторов внутри ЭБУ поврежден. Если у нас низкое сопротивление цепи (ниже 53,5 Ом), то перейдите к следующему шагу.
ШАГ 5: «Низкое сопротивление цепи — ниже 53,5 Ом»:
Если измеренное сопротивление ниже 53,5 Ом, то у нас замыкание цепи между CAN HIGH и LOW. Необходимо разбить шину на участки и продиагностировать их отдельно на наличие замыкания. Если после отключения одного из модулей сопротивление становится нормлаьным, значит замыкание внутри блока управления и его необходимо менять.
Другими продвинутыми методами диагностики всех видов шин данных Вы сможете овладеть на наших занятиях!
Школа Автодиагностики ИНЖЕКТОРКАР
Написать комментарий
Ваш комментарий: Внимание: HTML не поддерживается! Используйте обычный текст.
Введите код, указанный на картинке:
Источник
Почему шина CAN использует резистор 120 Ом в качестве согласующего резистора, а не любое другое значение?
Я знаю причины использования согласующих резисторов на шине CAN и насколько это важно.
Но почему 120 Ом? Как возникло это значение? Есть ли конкретная причина использовать 120 Ом?
Вы должны быть знакомы с теорией ЛЭП чтобы понять более глубокую физику в игре здесь. Тем не менее, вот обзор высокого уровня:
Насколько важно оконечное соединение для вашей системы, почти исключительно зависит от длины проводов шины. Здесь длина определяется в терминах длин волн. Если ваша шина короче, чем одна длина волны более 10, окончание не имеет значения (практически), так как есть достаточно времени, чтобы отражения, вызванные рассогласованием импеданса, погасли.
Длина, определенная в длинах волн, является странной единицей при первом столкновении. Для преобразования в стандартные единицы вам нужно знать скорость волны и ее частоту. Скорость — это функция среды, через которую она проходит, и окружающей среды. Обычно это можно довольно хорошо оценить по диэлектрической проницаемости материала и предположить наличие свободного пространства вокруг этой среды.
Частота немного интереснее. Для цифровых сигналов (например, в CAN) вас интересует максимальная частота цифрового сигнала. Это хорошо аппроксимируется как f, max = 1 / (2 * Tr), где Tr — время нарастания (определяется 30% -60% от конечного уровня напряжения, консервативно).
Почему это 120 — это просто функция дизайна, ограниченная физическими размерами. Не особенно важно, какое значение они выбрали в широком диапазоне (например, они могли бы пойти с 300 Ом). Однако все устройства в сети должны соответствовать импедансу шины, поэтому после опубликования стандарта CAN больше не может быть споров.
Вот ссылка на публикацию (Спасибо @MartinThompson).
Этот тип шины CAN предназначен для реализации по витой паре проводов. Сопротивление линии передачи неуказанной витой пары не является точным, но 120 Ω будет в большинстве случаев близким для относительно больших проводов, обычно используемых для CAN.
Резисторы также имеют другую функцию в CAN. Вы можете думать о CAN как о шине с открытым коллектором, реализованной как дифференциальная пара. В сумме 60 Ом является пассивным соединением шины CAN. Когда ничто не управляет шиной, две линии находятся под одинаковым напряжением из-за 60 Ом между ними. Чтобы перевести шину в доминантное состояние, узел разделяет линии, около 900 мВ каждая, для общего дифференциального сигнала 1,8 В. Автобус никогда активно не доводится до рецессивного состояния, просто отпустить. Это означает, что сопротивление между линиями должно быть достаточно низким, чтобы линии возвращались в состояние ожидания в течение доли времени.
Обратите внимание, что настоящий стандарт CAN ничего не говорит о физическом уровне, кроме того, что он должен иметь эти доминирующие и рецессивные состояния. Например, вы можете реализовать шину CAN в виде одностороннего открытого коллектора. Дифференциальная шина, о которой вы думаете, очень часто используется с CAN и воплощена в микросхемах драйверов шин различных производителей, таких как микросхема MCP2551.
CAN Bus — это дифференциальная шина. Каждая дифференциальная пара проводов является линией передачи. В основном, согласующий резистор должен соответствовать характеристическому сопротивлению линии передачи, чтобы избежать отражения. Шина CAN имеет номинальное сопротивление линии 120 Ом. В связи с этим мы используем типичное значение нагрузочного резистора 120 Ом на каждом конце шины.
Источник
Еще раз о диагностике CAN-шины
 В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
 Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :

А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:

Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:

Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Источник