SPI и Arduino:
- Теория
- Вывод
- Ввод
Это первая статья из цикла статей, посвящённых шине SPI и работе с ней на платформе Arduino. Тема достаточно обширная, так что начнём с теории.
SPI (Serial Peripheral Interface), или последовательный периферийный интерфейс, был разработан компанией Motorola для организации быстрого и простого в реализации обмена данными между компонентами системы — микроконтроллерами и периферийными устройствами. На шине может быть одно ведущее устройство (master) и несколько ведомых (slave).
Интерфейс использует 4 линии для обмена данными:
- SCLK — Serial Clock: тактовый сигнал (от ведущего)
Другие обозначения: SCK, CLK
Arduino: пин 13 - MOSI — Master Output, Slave Input: данные от ведущего к ведомому
Другие обозначения: SDI, DI, SI
Arduino: пин 11 - MISO — Master Input, Slave Output: данные от ведомого к ведущему
Другие обозначения: SDO, DO, SO
Arduino: пин 12 - SS — Slave Select: выбор ведомого; устанавливается ведущим
Другие обозначения: nCS, CS, CSB, CSN, nSS, STE
Arduino: по умолчанию пин 10
Линия SS обычно для каждого ведомого своя, но некоторых ведомых возможно подключить к одной SS — такой способ используется для каскадного подключения устройств.
Стандартный алгоритм работы SPI таков:
- Ведущий устанавливает низкий уровень на той линии SS, к которой подключен нужный ведомый.
- Ведущий задаёт такт, «дрыгая» уровнем на SCLK, и одновременно с каждым дёрганьем SCLK выставляет нужный уровень на MOSI, передавая ведомому по биту за такт.
- Ведомый на каждый «дрыг» SCLK выставляет нужный уровень на MISO, передавая ведущему по биту за такт.
- Для завершения передачи ведущий устанавливает высокий уровень на SS.
SPI является полнодуплексной шиной — данные передаются одновременно в обе стороны. Типичная скорость работы шины лежит в пределах 1-50 МГц. Благодаря исключительной простоте алгоритма передачи SPI получил широчайшее распространение в самых различных электронных устройствах — например, в датчиках, чипах памяти, радиомодулях, и т.д.
Вообще, у SPI есть четыре режима передачи, которые основаны на комбинации «полярности» тактового сигнала (clock polarity, CPOL) и фазы синхронизации (clock phase, CPHA). Проще говоря, CPOL — это уровень на тактовой линии до начала и после окончания передачи: низкий (0) или высокий (1). А фаза определяет, на фронте или спаде тактового сигнала передавать биты:
- Режим 0: CPOL=0, CPHA=0
Чтение бита происходит на фронте тактового сигнала (переход 0 ⇨ 1), а запись — на спаде (1 ⇨ 0). - Режим 1: CPOL=0, CPHA=1
Чтение — на спаде, запись — на фронте. - Режим 2: CPOL=1, CPHA=0
Чтение — на спаде, запись — на фронте. - Режим 3: CPOL=1, CPHA=1
Чтение — на фронте, запись — на спаде.

Данные по SPI можно передавать либо старшим битом вперёд (по умолчанию для Arduino), либо младшим. Обычно используется первый вариант, но перед началом работы с устройством следует уточнять этот момент в документации.
Эта библиотека использует аппаратные возможности AVR для работы по SPI на Arduino, причём только в режиме ведущего (SPI master). Функций в ней совсем немного:
- begin() и end()
Инициализация и завершение работы с SPI. При инициализации линии SCLK (13), MOSI (11) и SS (10) настраиваются на вывод, выставляя на SCK и MOSI низкий, а на SS — высокий уровень. Вызов end() линии не трогает, оставляя в том же состоянии, что и до вызова — просто выключает блок SPI микроконтроллера. - setBitOrder(order)
Устанавливает порядок посылки битов данных (order):
MSBFIRST — первым идёт старший бит посылки (по умолчанию)
LSBFIRST — первым идёт младший бит - setClockDivider(divider)
Устанавливает делитель тактов для SPI относительно основной частоты. Доступны делители 2, 4, 8, 16, 32, 64 и 128. Соответствующие константы имеют имена вида SPI_CLOCK_DIVn, где n — делитель, например, SPI_CLOCK_DIV32. По умолчанию делитель равен 4 — при обычной тактовой частоте МК на Arduino в 16 МГц SPI будет работать на частоте 4 МГц.
На заметку: если устройство поддерживает частоту, скажем, 1.25 МГц, то нужно выставить делитель, соответствующий этой или меньшей частоте — 16, например. - setDataMode(mode)
Задаёт режим работы SPI, используя константы SPI_MODE0 (по умолчанию), SPI_MODE1, SPI_MODE2 и SPI_MODE3. Это те самые режимы c параметрами CPOL и CPHA. - transfer(value)
Осуществляет двустороннюю передачу: передаёт байт value и возвращает байт, принятый от ведомого.
Кроме того, доступны функции shiftIn(miso_pin, sclk_pin, bit_order) и shiftOut(mosi_pin, sclk_pin, order, value), они предоставляют программную полудуплексную передачу данных по SPI — этакие половинки метода transfer(): shiftIn() только принимает, а shiftOut() только передаёт данные. Как видно по их аргументам, они позволяют использовать любые цифровые пины Arduino в качестве линий SPI, но вы сами должны настроить их как входы/выходы, функции shiftIn() и shiftOut() этого не делают.
UPD 2015-12-10
Про настройку режима передачи SPI.
Код библиотеки содержится в C:\Arduino\hardware\arduino\avr\libraries\SPI\SPI.h
Т.о., при настройке режима передачи SPI — настраиваются 3-й и 2-й биты регистра SPCR:
SPCR (SPI Control Register)
Т.о., код — приведёт к установке CPOL = 0 and CPHA = 1 (0x04 == 0100).
Источник
SPI -Serial Peripheral Interface, краткое руководство
Данная статья является кратким дискурсом по шине SPI и не должна восприниматься как точная техническая документация. Рассматривается только полнодуплексный вариант применения.
Общие сведения:
SPI — (Serial Peripheral Interface) эспиай, последовательный периферийный интерфейс иногда называемый 4-х проводным интерфейсом, является последовательным синхронным интерфейсом передачи данных. Изобретён компанией Motorola в середине 1980-x. В отличие от I2C и UART, SPI требует больше сигналов для работы, но может работать на более высоких скоростях. Не поддерживает адресацию, вместо этого используется сигнал SS (slave select — выбор ведомого), который также иногда называется CS (chip select), CE (chip enable) или SE (slave enable). Поддерживает только одного ведущего на шине. Ведущий устанавливает скорость обмена данными и другие параметры, такие как полярность и фаза тактирования. Обмен данными происходит в режиме полного дуплекса, что означает устройства на шине могут одновременно передавать и принимать данные. Интерфейс использует следующие сигналы (в номенклатуре AVR, для получения точного названия сигналов обратитесь к технической документации микросхемы, с которой работаете):
- MISO (master in slave out) — вход ведущего, выход ведомого
- MOSI (master out slave in) — выход ведущего, вход ведомого
- SCK (serial clock) — сигнал тактирования
- SS (slave select) — сигнал выбор ведомого.
Несмотря на то, что интерфейс называется 4-х проводным, для подключения нескольких ведомых понадобится по одному проводу SS для каждого ведомого (в полнодуплексной реализации). Сигналы MISO, MOSI и SCK являются общими для всех устройств на шине. Ведущий посылает сигнал SS для того ведомого, обмен данными с которым будет осуществляться. Простыми словами, все ведомые, кроме выбранного ведущим будут игнорировать данные на шине. SS является инверсным (active-low), что означает что ведущему необходимо прижать эту линию для выбора ведомого.
Подключение:
SPI на Arduino:
Arduino UNO/Piranha UNO/Arduino ULTRA
На Arduino UNO/Piranha UNO/Arduino ULTRA выводы аппаратного SPI расположены на 10, 11, 12 и 13 выводах, а так же эти выводы соединены с колодкой ICSP (in circuit serial programmer):
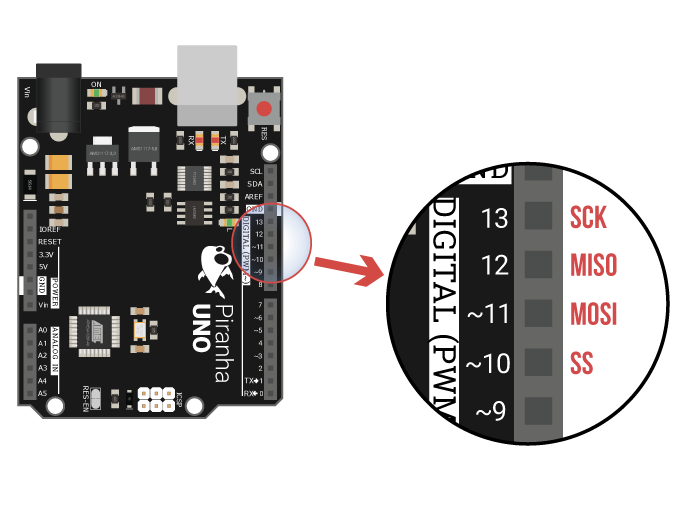
| Сигнал | Вывод |
|---|---|
| SS | 10 |
| MOSI | 11 |
| MISO | 12 |
| SCK | 13 |
Arduino MEGA
На Arduino MEGA выводы аппаратного SPI расположены на 50, 51, 52 и 53 выводах, а так же эти выводы соединены с колодкой ICSP (in circuit serial programmer):
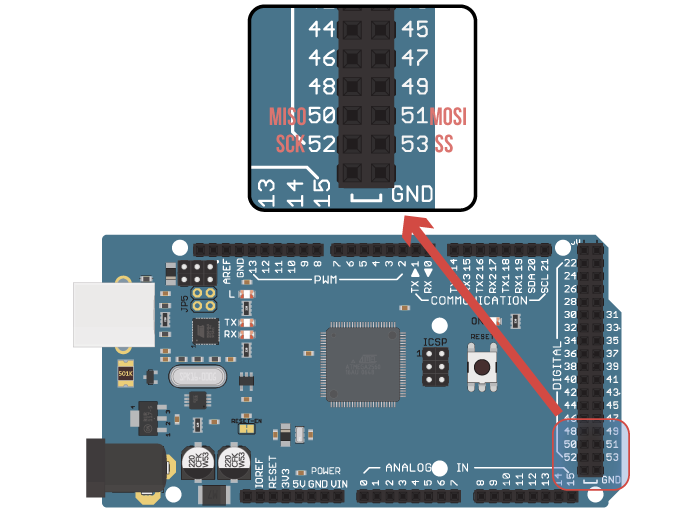
| Сигнал | Вывод |
|---|---|
| SS | 53 |
| MOSI | 51 |
| MISO | 50 |
| SCK | 52 |
Пример для Arduino
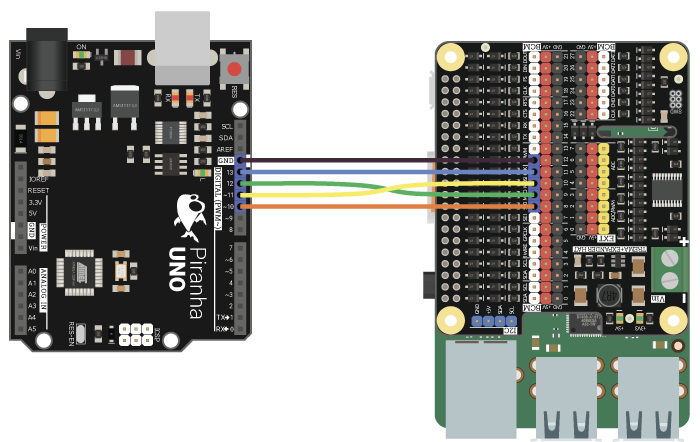
В этих примерах мы соединим две Arduino по SPI по следующей схеме:
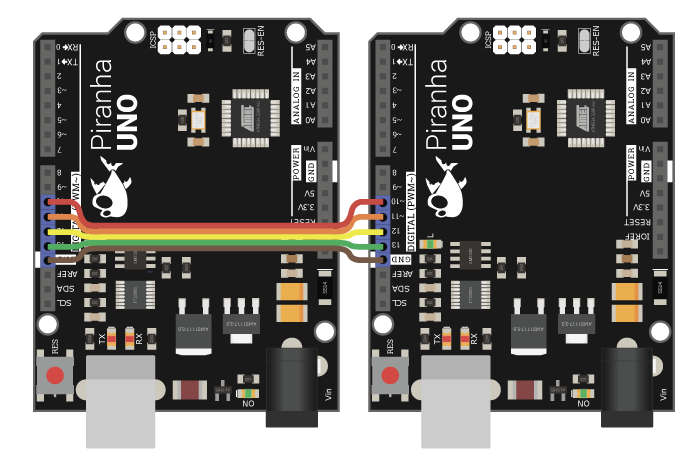
В одну плату необходимо загрузить скетч ведущего, а в другую скетч ведомого. Для проверки работы необходимо открыть проследовательный монитор той платы, в которую загружен скетч ведомого.
Arduino UNO в качестве ведущего:
Arduino UNO в качестве ведомого:
После соединения двух Arduino по SPI и загрузки соответствующих скетчей, мы будем получать следующее сообщение в мониторе последовательного порта ведомого микроконтроллера раз в секунду:
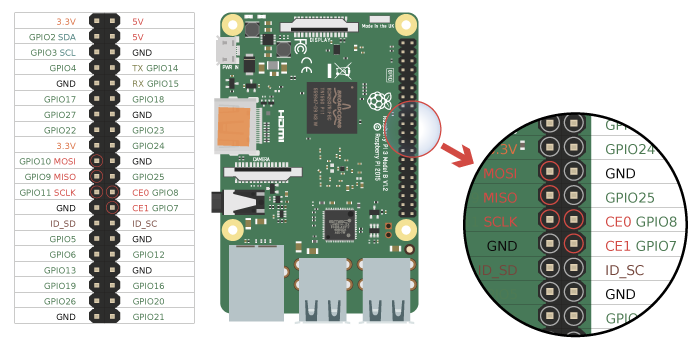
SPI на Raspberry Pi
На Raspberry Pi выводы аппаратного SPI расположены на выводах GPIO7, GPIO8, GPIO9, GPIO10, GPIO11:
Перед работой с SPI необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> SPI
Подробное описание как это сделать можно посмотреть по ссылке Raspberry Pi, включаем I2C, SPI
Пример работы с SPI на Python:
В отличие от Arduino для Raspberry не существует простых решений для работы в режиме ведомого. Подробней ознакомиться с работой чипа BCM Raspberry можно в технической документации на официальном сайте, стр. 160.
Для проверки работы сценария можно подключить Raspberry по SPI к Arduino со скетчем из примера выше через преобразователь уровней или Trema+Expander Hat:
Подробнее о SPI
Параметры
Существуют четыре режима работы SPI, зависящие от полярности (CPOL) и фазы (CPHA) тактирования:
| Режим | Полярность | Фаза | Фронт тактирования | Фронт установки бита данных |
|---|---|---|---|---|
| SPI_MODE0 | 0 | 0 | Спадающий | Нарастающий |
| SPI_MODE1 | 0 | 1 | Нарастающий | Спадающий |
| SPI_MODE2 | 1 | 0 | Нарастающий | Спадающий |
| SPI_MODE3 | 1 | 1 | Спадающий | Нарастающий |
В Arduino IDE для установки режима необходимо передать функции, возвращающей объект настроек параметр режима работы SPI_MODE, например:
Для выбора режима работы SPI на Raspberry Pi необходимо вызвать дескриптор объекта SpiDev().mode и присвоить ему битовые значения CPOL и CPHA, например:
Скорость передачи данных
Скорость передачи данных устанавливается ведущим и может меняться «на лету». Программист в силах указать лишь максимальную скорость передачи данных.
Источник
Национальная библиотека им. Н. Э. Баумана
Bauman National Library
Персональные инструменты
SPI (Serial Peripheral Interface)
 | |
| Разработчик | Motorola |
|---|---|
| Тип | Передача данных |
| Дата выпуска | 1985 год |
| ЦП | В зависимости от конкретной модели |
| Memory | В зависимости от конкретной модели |
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный периферийный интерфейс, служит для связи периферии и микроконтроллера. Например, в качестве периферии может быть: дисплей, различные датчики, FLASH память, SD карта (да, да, SD карта или «флешка» которую вы используете в телефонах и фотоаппаратах общается с внешним миром с помощью интерфейса SPI) и т.д.Интерфейс SPI, наряду с I2C, относится к самым широко-используемым интерфейсам для соединения микросхем. Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от ‘Serial Peripheral Bus’, что отражает его предназначение — шина для подключения внешних устройств. Шина SPI организована по принципу ‘ведущий-подчиненный’. В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др. Устройства SPI взаимодействуют в полнодуплексном режиме, используя архитектуру master-slave с одним ведущим устройством. Главное устройство инициирует кадр для чтения и записи. Иногда SPI называют четырехпроводной последовательной шиной, контрастирующей с трех-, двух-и однопроводными последовательными шинами. SPI может рассматриваться, как синхронный последовательный интерфейс, но он отличается от протокола синхронного последовательного интерфейса (SSI), который также является четырехпроводным синхронным последовательным протоколом связи. Протокол SSI использует дифференциальную сигнализацию и предоставляет только один симплексный канал связи. [Источник 1] .
Содержание
Интерфейс
В SPI используются четыре цифровых сигнала:
- MOSI или SI – выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому;
- MISO или SO – вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
- SCK или SCLK – последовательный тактовый сигнал (англ. Serial CLocK). Служит для передачи тактового сигнала для ведомых устройств.
- CS или SS – выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select).Как правило, выбор микросхемы производится низким логическим уровнем.
В зависимости от комбинаций полярности и фазы синхроимпульсов возможны четыре режима работы SPI. [Источник 2] . Хотя приведенные выше имена контактов являются наиболее популярными, в прошлом иногда использовались альтернативные соглашения об именовании контактов, поэтому имена контактов портов SPI для более старых продуктов IC могут отличаться от тех, которые представлены ниже:
| Режим SPI | Временная диаграмма |
| Режим SPI0 Активные уровень импульсов — высокий. Сначала защёлкивание, затем сдвиг. Активные уровень импульсов — высокий. Сначала сдвиг, затем защёлкивание. Активные уровень импульсов — низкий. Сначала защёлкивание, затем сдвиг. Активные уровень импульсов — низкий. Сначала сдвиг, затем защёлкивание.
Мастеру приходится настраиваться на тот режим, который используется ведомым. При обмене данными по интерфейсу SPI микроконтроллер может работать как ведущий (режим Master) либо как ведомый (режим Slave). При этом пользователь может задавать следующие параметры:
ОперацииШина SPI может работать с одним ведущим устройством и с одним или несколькими ведомыми устройствами. Передача данных
Рисунок 1 — Типичная конфигурация системы с использованием двух сдвиговых регистров для формирования интер-чипа кольцевого буфера Протокол передачи по интерфейсу SPI предельно прост и, по сути, идентичен логике работы сдвигового регистра, которая заключается в выполнении операции сдвига и, соответственно, побитного ввода и вывода данных по определенным фронтам сигнала синхронизации. Установка данных при передаче и выборка при приеме всегда выполняются по противоположным фронтам синхронизации. Это необходимо для гарантирования выборки данных после надежного их установления. Если к этому учесть, что в качестве первого фронта в цикле передачи может выступать нарастающий или падающий фронт, то всего возможно четыре варианта логики работы интерфейса SPI. Эти варианты получили название режимов SPI и описываются двумя параметрами:\
Ведущая и подчиненная микросхемы, работающие в различных режимах SPI, являются несовместимыми, поэтому, перед выбором подчиненных микросхем важно уточнить, какие режимы поддерживаются ведущим шины. Аппаратные модули SPI, интегрированные в микроконтроллеры, в большинстве случаев поддерживают возможность выбора любого режима SPI и, поэтому, к ним возможно подключение любых подчиненных SPI-микросхем (относится только к независимому варианту подключения). Кроме того, протокол SPI в любом из режимов легко реализуется программно. Часы полярности и фазыКак показано на рисунке 2, в дополнение к установке тактовой частоты, ведущий должен также установить полярность и временной участок по отношению к данным. Временная диаграмма на рисунке, показывает полярность и фазу часов — красные линии обозначают начальные края часов,а синие-конечные.
Рисунок 2 — Временная диаграмма SPI Возможны четыре комбинации фазы (CPHA) и полярности (CPOL) сигнала SCLK по отношению к сигналам данных. Режимы работы определяются комбинацией бит CPHA и CPOL:
Для обозначения режимов работы интерфейса SPI принято следующее соглашение:
Топология систем связи на базе SPIВ простейшем случае к ведущему устройству подключено единственное ведомое устройство и необходим двусторонний обмен данными. В таком случае используется трехпроводная схема подключения. Интерфейс SPI позволяет подключать к одному ведущему устройству несколько ведомых устройств, причем подключение может быть осуществлено несколькими способами, как показано на рисунках 3 и 4 [Источник 3] .
Первый способ позволяет реализовать радиальную структуру связи (топология типа «звезда»), его принято считать основным способом подключения нескольких ведомых устройств. В данном случае для обмена более чем с одним ведомым устройством ведущее устройство должно формировать соответствующее количество сигналов выбора ведомого устройства (SS). При обмене данными с ведомым устройством, соответствующий ему сигнал SS переводится в активное (низкое) состояние, при этом все остальные сигналы SS находятся в неактивном (высоком) состоянии. Выводы данных MISO ведомых устройств соединены параллельно, при этом они находятся в неактивном состоянии, а перед началом обмена один из выходов (выбранного ведомого устройства) переходит в активный режим. Второй способ позволяет реализовать структуру связи типа «кольцо». В данном случае для активации одновременно нескольких ведомых устройств используется один сигнал SS, а выводы данных всех устройств соединены последовательно и образуют замкнутую цепь. При передаче пакета от ведущего устройства этот пакет получает первое ведомое устройство, которое, в свою очередь, транслирует свой пакет следующему ведомому устройству и так далее. Для того, чтобы пакет от ведущего устройства достиг определенного ведомого устройства, ведущее устройство должно отправить еще несколько пакетов. Синхронизация в SPIЧастота следования битовых интервалов в линиях передачи данных определяется синхросигналом SCK, который генерирует ведущее устройство, ведомые устройства используют синхросигнал для определения моментов изменения битов на линии данных, при этом ведомые устройства никак не могут влиять на частоту следования битовых интервалов. Как в ведущем устройстве, так и в ведомом устройстве имеется счетчик импульсов синхронизации (битов). Счетчик в ведомом устройстве позволяет последнему определить момент окончания передачи пакета. Счетчик сбрасывается при выключении подсистемы SPI, такая возможность всегда имеется в ведущем устройстве. В ведомом устройстве счетчик обычно сбрасывается деактивацией интерфейсного сигнала SS. [Источник 4] . ПриложенияSPI используется с различными периферийными устройствами, такими как:
Для высокопроизводительных систем, FPGAs иногда использует SPI интерфейс как ведомый к ведущему, а ведущий к датчикам, или для флэш-памяти, используемой для загрузки, если они основаны на SRAM. [Источник 5] . Преимущества и недостатки интерфейса SPIПреимущества
Недостатки
СтандартыШина SPI- стандарт это де-факто. Однако отсутствие официального стандарта находит свое отражение в самых различных вариантах протокола. Различные размеры слова являются общими. Каждое устройство определяет свой собственный протокол, в том числе, если оно поддерживает команды. Некоторые устройства предназначены только для передачи, другие-только для приема. Некоторые протоколы сначала передают наименьший бит. Пример программной реализацииНиже представлен пример программной реализации SPI мастера на языке Си. Линия CS (chip select, выбор микросхемы) должна быть активирована (в большинстве случаев — притянута к низкому уровню), перед тем, как начнётся обмен данными, и деактивирована после окончания обмена. Большинство устройств требуют несколько сеансов передачи с активной линией CS. Эта функция может быть вызвана несколько раз, пока линия активна. Источник ➤ Adblockdetector |



