Использование модулей CAN на STM32 для разных целей

В последнее время, к сожалению, выросла цена на многие импортные радиодетали, в том числе и на отладочные платы с микроконтроллерами. А потребность в изготовлении разных поделок к счастью не пропала. Волей случая у меня в руках оказалось несколько интересных модулей от компании Starline, которая выпускает автомобильные сигнализации и много других полезных вещей (Можете поспрашивать у установщиков сигнализаций, или на сайте производителя). Целей раскрыть секреты работы этих модулей не стояло. Но ввиду их хорошего изготовления и оснащения оставить пропадать их без дела наше время тоже нехорошо.
Вкратце о модулях:
Модуль CAN — STM32F103RBT8 + SST25V016 + TJA1042, силовые ключи, микросхемы питания.
Модуль 2CAN — STM32F105RBT8 + SST25V032 + TJA1048, микросхемы питания.

(процессоры STM32F103 и STM32F105 (7) друг от друга функционально отличаются блоками тактирования, USB и CAN, надо обратить на это внимание далее)
Вооружившись тестером, разрисовал схемы модулей, возможно с ошибками. Наиболее интересным естественно оказывается модуль 2CAN, он позволяет одновременную работу USB FS и двух приемопередатчиков CAN. У первого модуля либо CAN, либо USB.
Скриншот схемы модуля CAN:

для поделок организация ввода вывода неплохая, но модуль 2CAN для интеграции в автомобиль интереснее, схема:

Так как на некоторых компонентах была неизвестная мне маркировка, то соответственно, я рисовал своё видение схемы.
Из модуля CAN на досуге сделал два полезных устройства – блок управления ходовыми огнями, и блок тестирования шаговых двигателей. Причем управление этими блоками осуществлялось как с внешних датчиков, так и по шине USB. Со стороны компьютера, подключенные блоки виделись как устройства с последовательным портом RS232. Причины изготовления блока управления ходовыми огнями – установленные китайские жгут чрезмерным током свои же светодиоды, от любой импульсной помехи выгорают с дымом. Блок их управления, не защищены от влаги, нет защиты от помех по питанию, нет экранировки. На CAN модуль была возложена функция управления логикой работы ходовых огней и дублирующих сигналов поворота, управление силовым транзистором повышающего преобразователя напряжения (на линейки светодиодов требуется порядка 24В), управление силовыми транзисторами, подающие питание на 4 линейки светодиодов, задержка выключения света в течение заданного времени после выключения зажигания.
Вот внутренности фонарей: 
В вот так выглядят внутренности драйвера после непродолжительной работы: 
Помехи от проводов от китайского ксенона погасили ходовые огни :). Ну а если делать с большим запасом надежности, и использовать модуль CAN, получается примерно так (еще без корпуса на этапе настройки под капризы заказчика):

Схема обвязки для модуля довольно простая (скриншот): 
Устройство тестирования шаговых двигателей, применяемых в автомобиле, задавать режим работы можно с компьютера (через терминал), и с кнопок тоже:

Это все конечно баловство, но работает. Вот подключится к блокам управления автомобиля уже интереснее. Модуль 2CAN решил подключить к центральному блоку управления легкового автомобиля, и по USB подключить его к персональному компьютеру, чтобы иметь возможность видеть какими данными обмениваются многочисленные блоки управления в автомобиле (оснащенного CAN шиной), и по необходимости самому посылать произвольные команды. Для начала, чтобы потренироваться пересылать данные по CAN шине между собой (двумя интегрированными на модуле блоками CAN), желательно сделать вот такую схему: 
Хотя бы так: 
С другой стороны: 
Но если вы подключаетесь уже к готовой функционирующей сети CAN, то это делать нет необходимости. К модулю допаяны светодиоды и кнопка, для отладки и наблюдения за работой модуля. И контакты для программирования по SWD. Что и куда подробно написано в комментариях в проекте. Модуль также при подключении к компьютеру по USB и будет определяться как последовательный порт (с использованием драйвера от ST). На что надо обратить внимание, блоки CAN микроконтроллера будут инициализироваться если:
Выводы микроконтроллера правильно сконфигурированы.
Выводы подключены к микросхемам – драйверам CAN шины.
На CAN шине выставлено правильное напряжение.
форма сигналов должна быть примерно такой:

Небольшая проблема возникла при приеме сигналов в модуль CAN2 (Sleave), нет смысла искать ответа в интернете и на форумах, в большинстве случаев будет лишняя трата времени, да и примеры готовые то в eclipse, то Iar, или вообще на ассемблере. А Я вот пишу в Keil (можно скачать бесплатно, немного обрезанную функционально версию). Оказывается, надо любить внимательно читать комментарии в стандартной библиотеке от STM. Необходимо просто правильно настраивать фильтр приема сообщений, и вот как раз на CAN2 (CAN Sleave) там отдельная процедура дополнительная. Для примера и приведу инициализацию CAN Sleave:
Обработчик прерываний CAN Sleave:
Добавлю и тактирование процессора stm32f105 (у stm32f103 все проще):
Все подробно можно посмотреть будет уже в проекте (KEIL).


Слева направо: плата STM32L в качестве программатора, модуль 2CAN, центральный блок управления автомобиля с двумя шинами CAN (высокоскоростная и низкоскоростная).
Вид без корпуса на процессор блока управления:

После того как запрограммировали модуль (прямо из KEIL, ST-Link SWD), через пару секунд после подключения USB кабеля в micro-USB разъем модуля 2CAN в компьютере определяется последовательный порт. Добавляем драйвера по необходимости, настраиваем номер порта, запускаем терминал, подаем команду «?»+«Enter», модуль отвечает своим меню: 
Подаем питание на блок управления автомобиля (в соответствии с документацией производителя), и видим сообщения, в которых блок управления пытается понять где сам автомобиль: 
Сигнал CANH на приборе(CANL зеркален по горизонтали и немного смещен): 
В остальном все заработало без проблем. Данные с блока управления автомобиля по его шинам CAN High Speed (500) и CAN Low Speed (250) сыпались в терминал без ошибок и пропусков. Более глобальной цели на данный момент я не ставил. В проекте часть кода заимствована из выложенных проектов других людей, часть написал, конечно сам. Добавлял комментарии на русском. Так как управление модулем происходило по виртуальному последовательному порту, через программу «Терминал», в микроконтроллере постоянно работает процедура, принимающая данные от компьютера, разбирающая их на команды и аргументы. Нажав в терминале «?» и «Enter», получим от микроконтроллера список доступных команд и аргументов. По крайней мере, можно наверняка найти и другие недорогие способы использования для подобных вещей. В остальном, думаю разберетесь. Если что, можно задавать вопросы. Попробую выложить заодно файлы проектов, схем и документации, как появится возможность на этой страничке. Или если есть куда выложить мег. 70 полного архива, включающего полную документации и библиотеки. Извиняюсь за стиль кода и изложение, так как программирование не моя основная работа, делал все урывками, и ушло на все времени две недели.
Или спрашивайте тут, постараюсь ответить (статья начала 2015 года).
Далее, на примере данного блока напишу работу с автомобилем.
(в связи с кончиной сайта, где я раньше публиковался, ветка общения со специалистами пропала к сожалению)
С уважением, Астанин Сергей.
ICQ 164487932
Проект приложен.
схемы в лучшем разрешении в pdf в архивах.
Источник
Сделаем мир удобнее. —>
STM32. Реализация протокола CAN на базе МК STM32F103
По реализации работы CAN протокола на МК STM32 публикаций в интернете достаточно много. Но довольно тяжело настроить готовый код под свое устройство, особенно если пытаемся это сделать впервые.
В рамках данной статьи я постараюсь максимально подробно разобрать программный код и подробно описать «подводные камни», с которыми может впервые столкнуться новичок.
Физическая связь
В первую очередь попытаемся разобраться как наш микроконтроллер связывается с CAN-шиной.
Большинство контроллеров семейства STM32 имеют одно или несколько модулей CAN. Каждый порт — это две ножки: TX — для передачи данных и RX — для приема данных с шины. CAN-порт для удобства можно перенаправить на другие ножки контроллера, это может облегчить разводку платы. Например в stm32f103c8 «по умолчанию» это пины PA11 (CAN_RX) и PA12 (CAN_TX), но их можно перенаправить на пины PB8 и PB9 соответственно.
Для связи микроконтроллера с шиной недостаточно настроить ножки и подцепить их к CAN — в лучше случае может выгореть порт контроллера, а в худшем и все наше устройство целиком. Для подсоединения контроллера к шине требуется еще один электронный компонент — приемопередатчик физического уровня сети (трансивер), как правило -это 8-ми контактная микросхема в корпусе SOIC-8 или DIP-8. также встречаются в корпусах SOT23-8 и SOIC-14, но намного реже.
Трансивер в виде отдельной микросхемы является необходимостью. Объясняется это, прежде всего, высокими требованиями к его надежности и рабочим характеристикам, поскольку работает он с цепями, физически выходящими за пределы устройства (в данном случае это сама шина CAN). А условия, в которых находятся эти цепи, зачастую не определены: например, сильные магнитные поля или пролегающие рядом силовые высоковольтные цепи. Более того, при необходимости гальванической развязки ее удобнее всего осуществлять именно между трансивером и контроллером CAN-сети.
Данный материал посвящен больше программной части, поэтому более подробно о «железной» составляющей проекта, о видах трансиверах и вариантах их использования, я опишу в отдельной статье.
Программная часть
Поняв как это все работает физически, приступим к рассмотрению программной части.
Программную часть можно разделить на несколько частей:
• Настройка порта и инициализация CAN шины;
• Настройка фильтрации сообщений;
• Прием сообщений;
• Передача сообщений.
Вдобавок нужно также предусмотреть обработку ошибок CAN, но сделаем это в отдельной статье, так как для первого запуска и понимания работы с шиной этого будет достаточно.
Разберем теперь каждый этап подробнее.
Настройка порта
Приведу пример настройки портов и инициализации CAN шины в микроконтроллере STM32F103
В определениях сразу предусмотрим возможность переопределения портов обмена с CAN шиной. Если нам не нужен ремап, то строка «#define CAN1_ReMap» должна быть закомментирована, а если же мы используем переадресацию, то просто раскомментируем эту строку и CAN будет настроен на работу через порт GPIOB на пинах PB8 и PB9.
Следует обратить внимание на то, что если в Вашем микроконтроллере несколько CAN устройств, то настройка переадресации, как и настройка CAN в целом, может немного отличаться.
Далее в процедуре инициализации мы включаем тактирование альтернативных функций, CAN-шины и порта, на котором будет «висеть» наша шина, иначе у нас ничего не заработает, так как контроллер не будет знать, что эту периферию нужно активировать.
Затем настраиваем ножки контроллера:
Для CAN RX настраиваем режим работы как GPIO_Mode_IPU — вход с подтяжкой к питанию,
а для CAN TX настраиваем режим работы как GPIO_Mode_AF_PP — выход с двумя состояниями (Push-Pull) для альтернативных функций.
Если у нас включена переадресация, то компилятор добавит в код еще и команду ремапинга портов шины.
В принципе это вся настройка пинов, теперь нам осталось сделать инициализацию самого устройства.
Инициализация CAN
Определяем структуру описания CAN, затем «отключаем» его для настройки.
Нам необходимо задать несколько параметров протокола, а также режим работы и тайминги.
Здесь мы немного подробнее рассмотрим настройки инициализации.
Начнем с параметров работы CAN:
| Параметр | Расшифровка | Пояснение |
|---|---|---|
| CAN_TTCM | Enable or disable the time triggered communication mode. Включение или отключение режима Time Triggered Mode. | Этот параметр влияет на включение таймера. Внутренний 16-битный таймер используется для привязки метки времени к каждому принятому и отправленному сообщению. Этот таймер начинает счет с момента разрешения работы контроллера CAN. Этот счетчик может быть сброшен приложением или автоматически после приема в последний mailbox, когда установлен Time Triggered Mode |
| CAN_ABOM | Enable or disable the automatic bus-off management. Включение или отключение автоматического отключения шины. | Если режим включен, то при накоплении ошибок приема данных из шины, CAN автоматически будет отключен. В любом случае необходимо контролировать ошибки приема, содержимое почтовых ящиков и, при необходимости сбрасывать ошибки вручную. |
| CAN_AWUM | Enable or disable the automatic wake-up mode. Включение или отключение автоматического пробуждения устройства по сигналу с CAN-шины. | При включении этого параметра устройство будет автоматически просыпаться, но следует обратить внимание что на активацию устройства требуется некоторое время и первый пакет, переданный по шине, может быть утерян. |
| CAN_NART | Enable or disable the no-automatic retransmission mode. Включение или отключение режима проверки получения пакета. | |
| CAN_RFLM | Enable or disable the Receive FIFO Locked mode. Включение или отключение режима блокировки Receive FIFO | 0 — при переполнении RX_FIF0 прием не прерывается (3 сообщения до заполнения FIFO), каждый новый пакет затирает предыдущий 1 — при переполнении RX_FIF0 прием прерывается (3 сообщения до заполнения FIFO), новые пакеты отбрасываются до освобождения RX_FIFO. (Спасибо maxx_ir за подсказку) |
| CAN_TXFP | Enable or disable the transmit FIFO priority. Включение или отключение приоритета передачи FIFO | Включение этого параметра определяет, в каком порядке сообщения будут отправляться в шину. Если параметр включен, то сообщения отправляются в хронологическом порядке: FIFO — First Input First Output — Первый пришел — первым ушел. Если же выключен, то пакеты передаются в зависимости от приоритета ID пакета. Т.е. пакет с более высоким приоритетом будет отправлен раньше. |
Для первого запуска и тестирования устройства нам будет достаточно включить режим «CAN_NART». При подключении осциллографа к шине, если устройство нормально функционирует, мы увидим всплески активности в зависимости от того, как часто передаем данные по шине.
Если же «CAN_NART» выключен, то при включенном параметре «CAN_ABOM» будет предпринято всего 128 попыток передать пакет, а потом микроконтроллер отключит модуль Can (если Вы не будете обрабатывать ошибки и сбрасывать счетчики ошибок). При выключенном «CAN_ABOM» автоматического отключения модуля Can не произойдет.
Если же устройство не будет получать подтверждение о получении пакетов, то осциллограф нарисует «расческу», так как устройство будет бесконечно пытаться передать пакеты, пока не получит подтверждения.
Следующий параметр CAN_Mode определяет в каком режиме контроллер будет работать с CAN-шиной:
| Параметр | Расшифровка | Пояснение | ||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CAN_Mode_Normal
| Normal -нормальный режим работы | При этом параметре МК будет работать в обычном (нормальном) режиме работы. Данные будут передаваться и читаться из шины. | ||||||||||||||||||||||||||||||||||||
| CAN_Mode_LoopBack
| LoopBack — слушать себя | При выборе режима LoopBack, контроллер будет передавать данные в шину и слушать себя же одновременно. Это равносильно тому, что в USART мы бы замкнули ножку TX на ножку RX. Но пакеты из шины доходить до контроллера не будут. | ||||||||||||||||||||||||||||||||||||
| CAN_Mode_Silent
| Silent — слушать шину | Идеален при настройке устройств, которым нужно только слушать шину. Например, если нам нужно подключиться к CAN шине автомобиля, но мы боимся допустить какие либо сбои из-за неправильной отправки пакетов в шину, то этот режим будет идеальным, так как в шину автомобиля пакеты из устройства попадать не будут. | ||||||||||||||||||||||||||||||||||||
| CAN_Mode_Silent_LoopBack
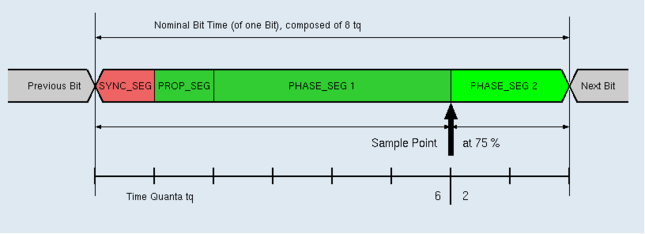
| Это объединенные режимы Silent и LoopBack — слушать только себя | В данном режиме все пакеты будут полностью крутится внутри контроллера без выхода в общую шину. Из шины соответственно ни один пакет данных не дойдет до устройства. Этот режим идеален для отладки устройства. При включении его мы можем как передать данные в шину, так и обработать те данные, которые мы же и отправили, при этом не имея физического подключения к шине. Повторюсь, если Вы только начинаете работать с CAN и у Вас нет готового устройства с трансивером, Вы можете научится работать с шиной на любой отладочной плате с микроконтроллером STM32, который поддерживает CAN. Для этого достаточно выбрать при настройке режим работы CAN_Mode_Silent_LoopBack или CAN_Mode_LoopBack. В этих режимах Вы сможете отправлять пакеты данных и принимать их же на одном устройстве. Настройка тайминговСинхронизация и тайминги в CAN — отдельный, важный и сложный вопрос. Однако, благодаря сложности и продуманности становится не так важна возможная рассинхронизация и нестабильность тактовых частот узлов сети, и связь становится возможной даже в тяжёлых условиях. Вкратце разберем как выглядит передача одного бита информации при передаче сообщения в CAN шине.
Всё время делится на кванты длиной t_q, и номинальная длительность бита равна 1+BS1+BS2 квантов. Захват значения бита происходит на границе BS1 и BS2. В процессе приёма приёмник определяет, в какой из временных периодов произошёл перепад сигнала (т.е. начало приёма нового бита). В норме перепад должен произойти на границе SYNC и BS1, если он произошёл раньше — контроллер уменьшает BS1, если позже — увеличивает BS2 на величину SJW (от 1 до 4 квантов времени). Таким образом, происходит постоянная пересинхронизация с частотой других приёмников. В нашем примере мы настраиваем тайминги с учетом того, что перефирия настроена на частоту 8MHz. С помощью калькулятора таймингов, выбираем оптимальные под нашу шину и микроконтроллер. Скорость шины настраивается с помощью прескалера. При указанных параметрах тайминга и CAN_Prescaler равным 50 — скорости передачи по шине составит 10 Кбит. Для изменения скорости передачи, в нашем примере достаточно изменить CAN_Prescaler, например при значении равном «1», скорость передачи составит 500 Кбит, при «2» — 250 Кбит, ну и так далее. В примере кода, предоставленном во вложении к данной статье, расписаны все значения CAN_Prescaler, доступные для данного проекта. В принципе можно добится скорости вплоть до 1 Мбита. За настройку таймингов при инициализации CAN устройства отвечают четыре параметра:
Для тестирования достаточно будет использовать параметры настройки таймингов, предложеные в примере. Более подробно о том что такое тайминги, а также как их правильно выставить описано в отдельной статье (STM32. Настройка таймингов работы CAN). Настройка фильтрации пакетов CANВсе входящие сообщения проходят через фильтр. Фильтр можно настроить на отслеживание как какого-то конкретного сообщения так и группы — настройка маски. Благодаря этому уменьшается нагрузка на процессор, так как ему не приходится самому отфильтровывать ненужные сообщения — это делается на аппаратном уровне. В рамках данной публикации я не буду подробно описывать настройку работы с фильтрами, это материал для отдельной статьи (см. Почтовые ящики. Фильтры пакетов CAN). Скажу лишь, что для начала достаточно установить фильтры без ограничений, а впоследствии можно самостоятельно их настроить под свои требования. Необходимо обратить внимание, что настройка фильтров и включение их обязательно, иначе Вы не сможет получать сообщение из шины. Настройка прерываний на прием сообщений CANС прерываниями дела обстоят ни чуть не сложнее, чем со структурой инициализации. Для начала надо настроить и проинициализировать контроллер прерываний (NVIC — Nested vectored interrupt controller). В архитектуре STM32 каждому прерыванию можно выставить свой приоритет для случаев, когда возникает несколько прерываний одновременно. Поэтому NVIC представляет нам несколько вариантов формирования приоритетных групп. Я не буду вдаваться в подробности, в нашем случае это не актуально, так как у нас на данный момент настроено лишь одно прерывание на обработку пакетов CAN/ Для того, чтобы мы смогли получать сообщения из CAN шины, мы должны включить прерывания на получение сообщений шины, а также разрешить прерывания по факту появления сообщений в почтовом ящике. Следует обратить внимание, что прерывание для CAN шины и USB одно и тоже. Если Вы будете использовать оба устройства в своей разработке, то необходимо более тщательно подойти к обработке прерываний от них. Могут возникнуть проблемы вплоть до полного отказа одного из устройств. В параметре «NVIC_IRQChannel» мы указываем, какое именно прерывание мы инициализируем. Константа «USB_LP_CAN1_RX0_IRQn» обозначает канал, отвечающий за прерывания, связанные с CAN1. Найдя ее определение в файле stm32f10x.h, вы увидите еще множество констант (ADC1_IRQn, TIM1_TRG_COM_TIM17_IRQn и др.), обозначающих прерывания от других периферийных устройств. Следующими двумя строками мы указываем приоритет прерываний (максимальные значения этих двух параметров определяются выбранной приоритетной группой). Затем указываем, что прерывание активно. Последняя строка, собственно, включает использование прерывания. На этом настройку CAN можно считать законченной. Мы учли все основные моменты, которые могут возникнут на начальном этапе изучения возможностей CAN шины. В зависимости от моделей контроллеров код может несколько меняться, но общие принципы работы остаются и легко портируются на разные семейства микроконтроллеров. Получение данных из шиныДля получения данных из шины CAN используется прерывание. В микроконтроллерах STM32 пакеты из шины обрабатываются на уровне железа. После получения контроллером сообщения, он пропускает его через фильтры и только после этого помещает их в мэйлбокс. И уже только после того, как сообщение помещено в почтовый ящик, происходит вызов прерывания на получение сообщения. Стоит обратить внимание, что если фильтр не включен или не настроен, даже без установки фильтрации, Вы не сможете получать сообщения из шины, так как они просто не будут помещаться в почтовый ящик и, соответственно, не будет вызываться прерывание. Рассмотрим вариант обработки прерывания на основе тестового сообщения сети. Идентификаторы команд указаны в заголовочном файле can.h (во вложении к статье). Но Вы можете использовать и любые свои. Для начала мы объявляем переменную и заполняем ее нулями. Если этого не сделать, то сообщение будет заполнено «мусором», что может нам несколько усложнить жизнь в случае появления ошибок. После этого проверяем статус нашего почтового ящика и, если есть сообщения, обработаем их. Затем проверим формат кадра: Если стандартный, то проверяем параметр «StdID», но а если расширенный, то данные команды будут в параметре «ExtId». После получения тестового сообщения, мы в ответ отсылаем подтверждение получения. Здесь мы не рассматриваем передачу блока данных (но в тестовом сообщении мы их передавали). Для проверки наличия данных в пакете, необходимо проверить параметр сообщения «DLC», если его значение больше нуля, то мы можем получить ровно столько байт, сколько указано в этом параметре. данные хранятся в массиве «Data[0..7]». Отправка данных в шинуДля отправки тестового пакета в шину напишем отдельную функцию, которая будет вызываться из основного цикла программы несколько раз в секунду. Здесь все просто: объявляем переменную TxMessage, заполняем данные для отправки и выполняем команду передачи данных в шину. Теперь немного подробнее о параметрах сообщения:
|